Raccolta casi Working Model, visualNastran & SimWise - Dinamica motoscooter

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
ANALISI E CONFRONTO DEL COMPORTAMENTO DINAMICO DI MOTOSCOOTER CON DIVERSE TIPOLOGIE DI SOSPENSIONI ANTERIORI
di Enrico Volo
-
Il team del Prof.
Cossalter all'Università di Padova e l'Aprilia hanno
sviluppato soluzioni innovative di sospensioni per motoscooter.
- Passaggio a velocità costante su un dissuasore di velocità
- Passaggio a velocità costante su una serie di tre gradini
- Passaggio a velocità costante su un tratto di terreno ondulato tipo pavè
- Frenata su terreno perfettamente piatto
- Frenata su dissuasore
- Frenata su terreno ondulato (pavè)
- la sospensione a braccio spinto garantisce variazioni di assetto inferiori rispetto alla forcella
- il comfort non trae vantaggi passando dalla forcella al braccio spinto
- l'aderenza è notevolmente superiore nel caso del braccio spinto
- comportamento anti-dive con negative dell'asta di reazione e pro-dive con inclinazioni positive
- il comfort è superiore con sospensioni anti-dive
- l'andamento della reazione verticale del terreno è molto più regolare con sospensioni anti-dive
- variazioni di assetto maggiori con sospensioni anti-dive
- miglioramento del comfort con sospensioni anti-dive
- l'aderenza è nettamente superiore con sospensioni pro-dive
- eccezionale miglioramento del comfort con la sospensione a braccio spinto rispetto alla forcella
Ecco in questa pagina una sintesi dell'impostazione del lavoro che ha portato allo sviluppo delle due nuove sospensioni:
1) Sistema N.T.S. (Neutral Trim Suspension, anteriore)
2) Sistema S.I.P.S. (Single In-Line Progressive Suspension, posteriore)
La prima applicazione commerciale è stata realizzata con lo scooter Area 51.
Ulteriori dettagli nel sito Dinamica del motociclo.
La riproduzione di queste pagine senza il permesso scritto dell'autore è vietata.
![]()
Queste ricerche sono svolte in collaborazione con la
Società Aprilia
e in particolare con l'ing. Gaetano Cocco.
Lo scooter
Lo scooter è diventato il principale protagonista del mercato motociclistico nazionale ed internazionale. Inoltre questo veicolo è destinato ad un utenza che spazia dai giovani, spesso giovanissimi, fino alle anziane signore e ne fa un utilizzo quotidiano e prevalentemente urbano. È quindi necessario che lo scooter garantisca facilità di guida, maneggevolezza, comfort e soprattutto sicurezza.
Lo studio e la progettazione di questo veicolo non possono basarsi su una banale riduzione in scala di una motocicletta di tipo tradizionale, in quanto si differenzia da quest'ultima non solo per le dimensioni ed il peso, ma anche per la posizione del pilota e soprattutto per la diversa disposizione del motore che diventa parte integrante della sospensione posteriore aumentando così le masse non sospese relative al retrotreno modificandone il comportamento dinamico.
Le sospensioni anteriori
Le tipologie di sospensioni anteriori esaminate sono la forcella telescopica e la sospensione a braccio spinto.
La sospensione a forcella è costituita essenzialmente da due steli che scorrono entro due foderi, quindi da una coppia prismatica. Il braccio spinto è realizzato mediante un braccio oscillante il cui centro di rotazione relativo al telaio è posto posteriormente rispetto al perno ruota.
Per valutare il comportamento di una sospensione è necessario conoscere la sua rigidezza ridotta rispetto alla verticale.
La rigidezza ridotta della sospensione a forcella dipende unicamente dall'angolo d'inclinazione dello sterzo e dalla rigidezza della molla:
![]()
La rigidezza ridotta della sospensione a braccio spinto è funzione della posizione del braccio oscillante, della sua lunghezza, della posizione della molla e della sua rigidezza:

L'andamento della rigidezza ridotta rispetto alla verticale della forcella è costante all'aumentare dello spostamento verticale del perno ruota (sospensione lineare), mentre quello della sospensione a braccio spinto è crescente (sospensione progressiva).
Perchè il confronto tra due sospensioni sia attendibile è necessario che le loro rigidezze ridotte siano uguali, almeno nella posizione di equilibrio.
Il comportamento dello scooter
Per valutare il comportamento dello scooter con le diverse sospensioni anteriori vengono presi in considerazione parametri di assetto, comfort ed aderenza. Per l'assetto si considera l'altezza del baricentro ed il moto di beccheggio, per il comfort l'accelerazione verticale del baricentro e quella di beccheggio e per l'aderenza la reazione verticale del terreno relativa alla ruota anteriore.
Una sospensione è ritenuta migliore dell'altra quando assicura variazioni di assetto e accelerazioni minori e quando il minimo della reazione verticale del terreno è maggiore.
Le prove eseguite per rilevare le prestazioni delle diverse sospensioni anteriori sono:
|
|
|

Nelle prove di frenata è importante considerare che l'assetto di un motociclo è influenzato dall'effetto del trasferimento di carico.
In seguito all'applicazione della forza frenante F nasce una nuova componente del carico verticale sulle ruote detta trasferimento di carico. Infatti, dall'applicazione delle equazioni cardinali della dinamica si ottiene:
|
|
forza frenante |
|
|
carico dinamico sulla ruota anteriore |
|
|
carico dinamico sulla ruota posteriore |
|
|
trasferimento di carico |
La sospensione anteriore viene quindi sollecitata da una nuova forza, risultante della forza frenante e del trasferimento di carico, la cui retta di applicazione è detta retta del trasferimento di carico.
L'azione di questa forza deve essere equilibrata dall'azione della molla, che dovrà necessariamente variare la sua lunghezza.
In funzione della posizione della retta del trasferimento di carico rispetto al centro di istantanea rotazione della ruota rispetto al telaio, la molla viene compressa o estesa.
Nel caso della sospensione a braccio spinto, il supporto della pinza freno può essere collegato direttamente al telaio tramite un'asta di reazione. In questo modo è facile modificare la posizione del centro di rotazione della ruota rispetto al telaio semplicemente variando l'inclinazione dell'asta di reazione.
Nel caso in cui la molla venga compressa, la sospensione è detta pro-dive:
Nel caso in cui la molla venga estesa, la sospensione è detta anti-dive:
La simulazione
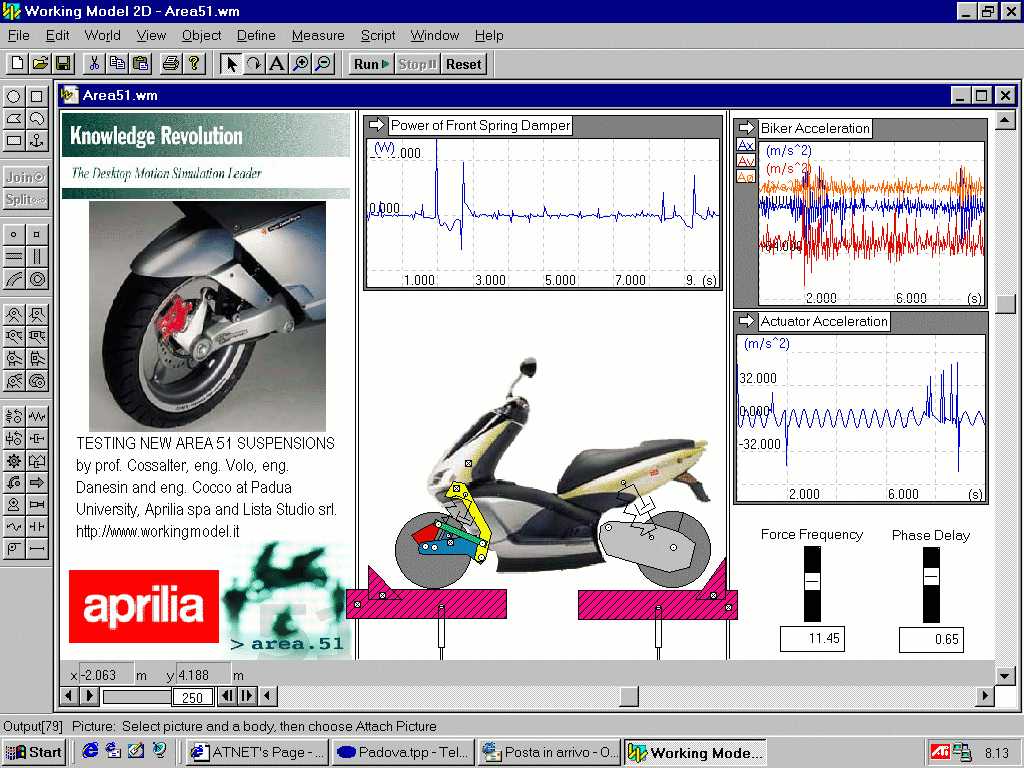
L'analisi ed il confronto nel piano tra i vari tipi di sospensioni anteriori applicati allo scooter è stata eseguita mediante simulazione con il codice di calcolo multybody Working Model 2D della Knowledge Revolution.
Il programma richiede l'inserimento dei dati relativi alle caratteristiche del veicolo e del terreno e consente di esportare i risultati sia sotto forma di animazioni che come diagrammi. Sostanzialmente è come applicare allo scooter un apparato per la telemetria.
Le quote e le masse della sospensione a braccio spinto sono state fornite dalla casa costruttrice Aprilia.
Le prove di frenata sono state effettuate applicando al veicolo la sospensione a forcella e la sospensione a braccio spinto con diverse inclinazioni dell'asta di reazione. Le variazioni di inclinazione dell'asta possono essere ottenute semplicemente alzandone (inclinazioni positive) o abbassandone (inclinazioni negative) il punto di attacco al telaio. E' stata provata anche la configurazione a braccio spinto senza asta di reazione in cui la pinza freno è collegata direttamente al braccio oscillante.
Ecco un esempio di simulazione con Working Model:
I due diversi scooter, che viaggiano alla stessa velocità, vengono frenati con il freno anteriore e con uguale coppia frenante. Il veicolo con sospensione anteriore anti-dive (viola) mantiene l'assetto mentre il veicolo con la forcella (blu) arriva al limite di rovesciamento.
Risultati
I risultati più interessanti sono quelli ottenuti nella prova in cui lo scooter inizia a frenare alla velocità di 50 km/h e dopo circa 7 m incontra un dissuasore di velocità. A chi non è capitato di dover frenare prima di un passaggio pedonale per l'improvvisa comparsa di un pedone?
Nei grafici relativi all'altezza del baricentro ed al moto di beccheggio si nota la variazione di assetto dovuta al trasferimento di carico. La sospensione a braccio spinto consente una personalizzazione del comportamento in frenata passando da pro-dive con inclinazioni positive dell'asta di reazione a comportamento anti-dive con inclinazioni negative e senza asta di reazione.
Dopo circa sette decimi di secondo il mezzo incontra il dissuasore e le sospensioni a comportamento pro-dive garantiscono le variazioni di assetto minori. Questo è dovuto alla loro maggior rigidezza ridotta rispetto alla verticale in assetto di frenata.
Fig. 1 Altezza del baricentro durante il superamento di un
dissuasore in frenata 
Fig. 2 Beccheggio dello scooter durante il superamento di un dissuasore in frenata
I diagrammi dell'accelerazione verticale del baricentro e dell'accelerazione di beccheggio evidenziano un netto miglioramento del comfort con sospensioni anti-dive sia nella fase iniziale della frenata sia durante il passaggio sull'ostacolo.
Fig. 3 Accelerazione verticale dello scooter durante il superamento di un dissuasore in frenata
Fig. 4 Accelerazione del moto di beccheggio dello scooter durante il superamento di un dissuasore in frenata
L'aderenza presenta un andamento nettamente più regolare con sospensioni anti-affondamento durante la fase iniziale della frenata. Queste sospensioni risultano molto meno efficaci delle altre nel superare l'ostacolo, presentando valori minimi della reazione verticale del terreno inferiori. In sostanza saltano di più sul dissuasore.
Fig. 5 Carico sulla ruota anteriore durante il superamento di un dissuasore in frenata
Le prove a velocità costante hanno evidenziato soprattutto che la sospensione a braccio spinto assicura variazioni di assetto minori rispetto alla forcella telescopica, come risulta evidente dai diagrammi seguenti relativi al passaggio su una serie di tre gradini alla velocità di 50 km/h.
Fig. 6 Accelerazione verticale durante il moto su una strada ondulata
Fig. 7 Accelerazione di beccheggio durante il moto su una strada ondulata
Le prove di passaggio su un tratto ondulato ad alta frequenza hanno posto in evidenza un netto miglioramento del comfort passando dalla forcella al braccio spinto, sia in frenata che a velocità costante. I due diagrammi seguenti rappresentano l'andamento delle accelerazioni dopo la stabilizzazione dell'oscillazione, a velocità costante.
Fig. 8 Altezza del baricentro dello scooter mentre supera un ostacolo composto da tre gradini
Fig. 9 Beccheggio dello scooter mentre supera un ostacolo composto da tre gradini
La simulazione permette inoltre di ottenere risultati che possono dare un'idea delle sensazioni che potrebbe provare il pilota passando da una sospensione all'altra. Ne è un esempio il diagramma dell'accelerazione orizzontale del baricentro del telaio in frenata. Si nota che quando lo scooter è equipaggiato con sospensioni pro-dive, raggiunge in lieve ritardo la decelerazione imposta dal pilota.
Fig. 10 Decelerazione dello scooter durante la frenata
Conclusioni
I risultati ottenuti mediante le simulazioni possono essere riassunti brevemente come segue.
Passaggio a velocità costante su un ostacolo:
Frenata su fondo stradale piatto
Ostacolo affrontato in frenata
Passaggio a velocità costante ed in frenata su un tratto di terreno ondulato ad alta frequenza