Come si possono risolvere le sollecitazioni alle cerniere in caso di iperstaticità?
Il visualNastran 3D Motion (ora SimWise Motion) risolve il moto di un meccanismo quando questo è descritto senza iperstaticità ovvero quando non sono presenti vincoli sovrabbondanti (cfr. Cosa significa l'avviso "Redundant Constraints"?).
Nell'ipotesi multy-body con corpi infinitamente rigidi, infatti, l'approccio risolutivo non può prescindere dal fatto che due corpi non abbiano lo stesso grado di libertà bloccato più volte.
In caso contrario la soluzione corretta del moto viene comunque proposta dal software, ma non certamente la distribuzione dei carichi (forze e coppie) in tutti i vincoli, in quanto quelli sovrabbondanti non saranno considerati dal solutore.
Il motore ACM (Automatic Constraint Mapping) del software visualNastran/SimWise provvede ad una interpretazione intelligente dei vincoli di assemblaggio definiti dal CAD, e pertanto questa operazione di controllo e correzione dei vincoli è gestita automaticamente dal software (Menù Simulations Settings - Warnings).
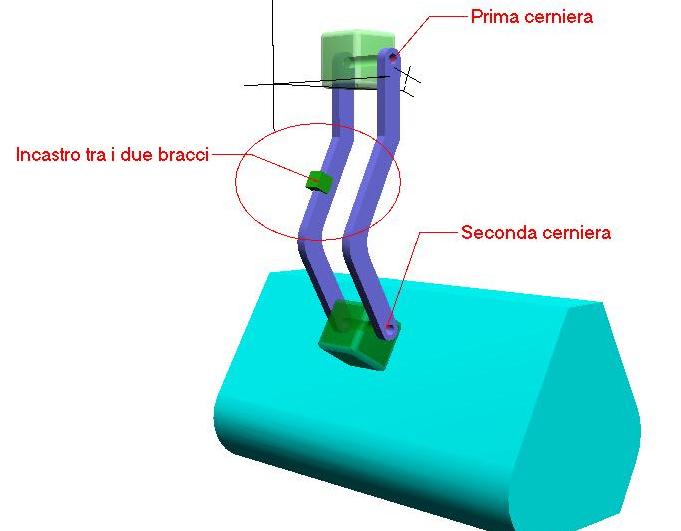
Nell'assieme SolidEdge "Bucket Sample" fornito tra gli esempi del software si vede infatti che la benna di figura non viene tradotta automaticamente con quattro cerniere,
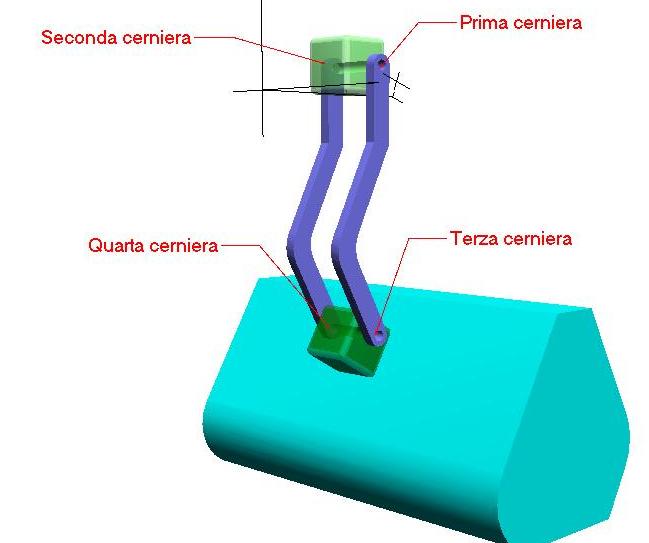
ma bensì con due sole cerniere ed un incastro.
Se i vincoli sono posti manualmente dall'utente e non tradotti automaticamente dal software a partire dall'assieme CAD (ovviamente correttamente definito), nasce allora la necessità di controllare che l'operatore non abbia inserito iperstaticità.
Per far questo risulta utile avvalersi dello schema cinematico, offerto dal menù "View - Kinematic".
Se tuttavia l'utente desidera comunque risolvere i carichi in presenza di vincoli sovrabbondanti, deve applicare una delle strategie proposte in How can WM3D be used to measure the forces in redundant constraints?.
Tali strategie consentono di individuare le caratteristiche di sollecitazione per l'esportazione verso software di analisi FEA esterni.
Nel caso della versione visualNastran 4D o SimWise 4D, il solutore FEA Nastran è già disponibile nel solutore cinetodinamico.
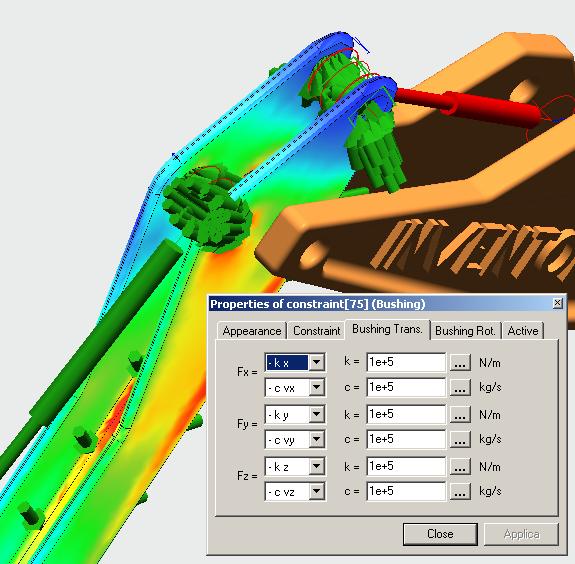
La strategia da applicare in questo caso è:
I vincoli bushing, impostati con valori di forza elevati e coppie nulle consentono infatti di sostituire la minima deformazione delle cerniere e quindi proporre l'analisi FEA integrata durante la simulazione cinetodinamica. Ovviamente, la corretta introduzione delle coppie resistenti negli stessi vincoli bushing rende possibile la simulazione anche dell'attrito delle cerniere stesse (o della coppia motrice applicata).
Il file di esempio di quanto esposto è disponibile nella Libreria casi notevoli.
Torna alla pagina di supporto
Versioni pertinenti:
visualNastran 4D e SimWise 4DData ultimo aggiornamento: 2 settembre 2011

Lista Studio srl®
URL : http://www.simwise4d.it
diritti riservati, riproduzione vietata