Come si possono misurare le forze in presenza di vincoli sovrabbondanti (iperstaticità)?
Un tipico esempio di un sistema iperstatico è rappresentato da un albero con due cuscinetti alle estremità. Usando il visualNastran 3D Motion, l'utente vuole poter misurare forze e coppie su ciascun cuscinetto mentre l'albero gira:
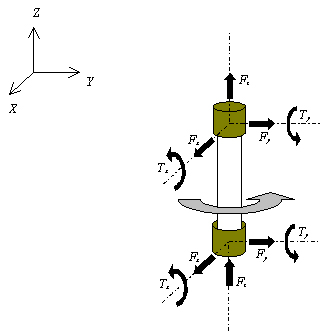
Potrebbe sembrare che un albero collegato ai supporti per il tramite di due cerniere sia la rapresentazione corretta del sistema, e che consenta la misura di forze F e coppie T sui due cuscinetti. Invece, questo modello risulta iperstatico! Sebbene il risultato cinetodinamico sia sempre corretto, viceversa forze e coppie calcolate sotto l'ipotesi di iperstaticità sono del tutto aleatorie. Si veda Cosa significa l'avviso "Redundant Constraints"?
Per risolvere il problema ed ottenere le forze e coppie cercate si possono esaminare diverse soluzioni. Per capire tutte le opzioni disponibili, bisogna prima capire quali forze e coppie ciascun vincolo è capace di applicare. Si veda Quali forze e coppie applica ciascuno dei vincoli disponibili in visualNastran 3D Motion?
La prima opzione per trovare la soluzione consiste nell'eliminare i vincoli sovrabbondanti, ovvero nel considerare che nessuno dei cuscinetti possa esplicare coppie resistenti e che tutto il carico verticale sia sostenuto dal cuscinetto più basso (B=basso). Si possono allora usare giunti sferici per impedire che ciascun cuscinetto applichi coppie sull'albero. Per far sě che tutto il carico verticale sia supportato dal cuscinetto inferiore, il cuscinetto più in alto (T=alto) sarà risolto come giunto sferico su pattino, con il pattino orientato per consentire moto verticale. Ora, se si chiedono le misure delle forze sui cuscinetti si ottengono valori corretti per (FBx ,FBy ,FBz in basso e FTx ,FTy in alto).
Questa soluzione, efficace per misuare le forze, non consente però l'uso di un motore per far girare l'albero nella simulazione (a meno che l'utente non imputi una velocità angolare come proprietà dell'albero). Se infatti l'utente lascia solo il giunto sferico su pattino in alto e sostituisce al giunto sferico in basso un motore, l'albero torna ad essere iperstatico per via delle coppie applicate dal motore.
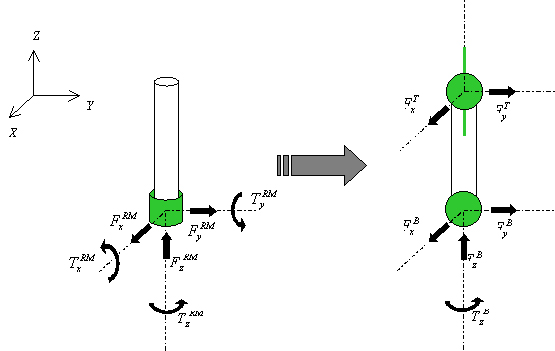
Una soluzione più generale con l'uso di un motore è, allora quella di eliminare il cuscinetto superiore ed usare un motore RM alla base dell'albero. Dal momento che questa configurazione non è ipestatica, si possono misurare accuratamente FRMx ,FRMy ,FRMz e TRMx ,T RMy ,TRMz al motore (RM=motore). Trovate queste grandezze, si possono calcolare per via analitica le forze e le coppie corrispondenti per ogni altra combinazione di vincoli. A questo punto, l'utente può decidere come ripartire il carico. Per esempio, per calcolare FBx,FBy ,FBz ,TBz e FTx ,FTy; cioè le forze e coppie associate con un vincolo di motore su giunto sferico in basso e un giunto sferico su pattino verticale in alto, si possono usare le formule riportate in fondo a questa pagina, in EQUATIONS e SOLUTIONS.
Infine, la soluzione definitiva è rappresentata dall'uso del visualNastran 4D v.2002 e superiori
Infatti, la soluzione integrata di cinetodinamica e analisi agli elementi finiti, a partire dalla release 2002 offre la possibilità della soluzione dei vincoli iperstatici per via automatica quando tutti i corpi e tutti i vincoli vengono inclusi nell'analisi FEA.
La procedura corretta per effettuare la soluzione automatica è proposta nel filmato "Redundant Constraints" della cartella "Build it" del corso interattivo "Getting Started", fornito nel secondo CD-ROM del corso interattivo a corredo del software.
NOTATION:| 6 Measured Revolute Motor Parameters |
3 Computed Bottom Bearing Forces (plus Driving Torque) |
2 Computed Top Bearing Forces |
DIAGRAMS:
| EQUATIONS: | SOLUTIONS: |
 |
 |
See also Come si possono risolvere le sollecitazioni alle cerniere in caso di iperstaticità?
Versioni pertinenti:
Working Model 2D, visualNastran 3D Motion e 4DData ultimo aggiornamento: 1 ottobre 2002

Lista Studio srl®
URL : http://www.workingmodel.it
diritti riservati, riproduzione vietata