Raccolta casi Working Model, visualNastran & SimWise - La progettazione di un sistema di movimentazione

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
LA PROGETTAZIONE DI UN SISTEMA DI MOVIMENTAZIONE
INTRODUZIONE
Un sistema di movimentazione multiasse può essere progettato in modo più rispondente alle esigenze dell'apparecchiatura su cui dovrà essere inserito se, alle modalità di progettazione basate sull'esperienza, si affiancano procedure intese a migliorare la qualità delle prestazioni senza richiedere il sovradimensionamento degli azionamenti, dei cinematismi e della struttura meccanica di supporto.Tali procedure possono essere applicate più facilmente se si dispone di software specialistici che consentano di realizzare in modo semplice e diretto la simulazione dei cinematismi, l'elaborazione delle variabili coinvolte nella movimentazione, la verifica di validità delle scelte effettuate per quanto concerne il dimensionamento degli azionamenti, oltre che la progettazione delle modalità di controllo.
L'approccio innovativo basato sulla simulazione dell'intero sistema di movimentazione, nelle condizioni operative che vengono ritenute più significative in relazione alla particolare applicazione cui è destinata la movimentazione, può sembrare meno immediato di quello fondato sulla realizzazione di un sistema di movimentazione ottenuto applicando criteri empirici e sulla messa a punto delle modalità di controllo durante il funzionamento, ma consente di raggiungere prestazioni di qualità superiore, di evitare il sovradimensionamento degli azionamenti, l'insorgere di condizioni operative impreviste, le perdite di tempo per la messa a punto per tentativi delle modalità di controllo empiriche, l'individuazione di cause di guasto evidenti e latenti.
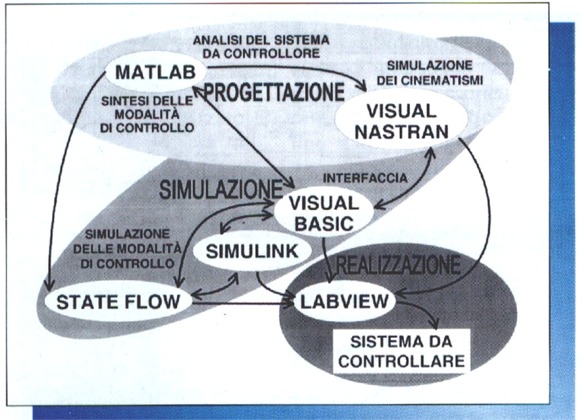
Interazioni fra i linguaggi e loro impiego
nella progettazione di un sistema di movimentazione
In definitiva, i vantaggi che se ne possono trarre giustificano ampiamente il nuovo approccio, ormai consolidato in quei settori in cui i miglioramenti tecnologici hanno reso disponibili componenti di elevate prestazioni.
Questi ultimi, opportunamente assemblati, possono portare a sostanziali innovazioni nelle apparecchiature progettate secondo modalità non più empiriche. Si tenga inoltre presente che la simulazione è ormai un passaggio obbligato se si vuole ottenere un sostanziale miglioramento delle prestazioni senza dover ricorrere al sovradimensionamento della struttura meccanica e degli azionamenti.
Il nuovo approccio alla progettazione dei sistemi di movimentazione richiede una formazione preliminare degli esperti nel settore della movimentazione, in modo che sappiano utilizzare i software necessari e soprattutto trasferire le loro conoscenze nella realizzazione e nella messa a punto di un modello di simulazione che fornisca una "realtà virtuale" dell'apparecchiatura durante il funzionamento.
Il software da utilizzare per la progettazione di un sistema di movimentazione è ormai cosě evoluto da consentire un rapido autoapprendimento da parte di persone che hanno già dimestichezza con software finalizzati ad altri scopi e professionalità consolidata nel settiore della movimentazione.
PROGETTAZIONE TRAMITE SIMULAZIONE
Il primo passo consiste nella realizzazione di un programma di simulazione dell'apparecchiatura che tenga conto dei cinematismi e della struttura di supporto.A tale scopo è essenziale conoscere i dettagli costruttivi relativi alla realizzazione dei cinematismi e alla natura del carico.
Per rendere più efficace la simulazione è opportuno affiancare alla simulazione dei cinematismi anche quella della struttura geometrica dell'apparecchiatura, in modo da realizzare una "realtà virtuale" del sistema di movimentazione.
Disponendo di tale modello, si possono imporre i profili desiderati di posizione e di velocità relativi alla movimentazione dei singoli assi e ricavare l'andamento di quelli effettivamente raggiunti, nonchè quelli della forza e della coppia.
Da tali andamenti è possibile effettuare il dimensionamento degli andamenti in funzione delle prestazioni che si desidera raggiungere.
È infatti immediato verificare se il campo di escursione effettivamente necessario è compatibile con quello previsto per l'azionamento.
Un'ulteriore possibilitŕ č quella di fissare le modalità di controllo della movimentazione a livello sia di coordinamento e di sequenzializzazione, sia di controllo del moto dei singoli assi, di verificare se è compatibile con i vincoli meccanici dell'apparecchiatura in cui il sistema di movimentazione dovrà essere applicato.
È possibile inoltre ricavare gli andamenti di quelle variabili (velocità e coppia) su cui si basa il dimensionamento dell'azionamento in modo da effettuare una scelta mirata, senza ricorrere al sovradimensionamento precauzionale.
Peculiarità dei linguaggi impiegati
nella progettazione di un sistema di movimentazione
Disponendo del modello di simulazione in "realtà virtuale" del sistema di movimentazione inserito in un'apparecchiatura, è anche possibile la progettazione di modalità di controllo più evolute di quelle tradizionali, che consentano di rendere più flessibile il coordinamento, di effettuare la diagnosi di funzionalità dell'intero sistema di movimentazione, di individuare l'insorgere di guasti latenti, di ottenere altre funzionalità, generalmente indicate come "controllo intelligente".
Verso tale tipo di controllo sono orientate le innovazioni più significative nel controllo della movimentazione.
PRESENTAZIONE DEI SOFTWARE
I software utilizzati per la progettazione di un sistema di movimentazione, singolarmente presi, sono caratterizzati ognuno da una notevole semplicità di applicazione, in quanto consentono di effettuare una programmazione grafica ad oggetti o tramite macroistruzioni.
Maggiori vantaggi si riescono ad ottenere facendo in modo che possano funzionare in maniera interattiva, con scambio dei dati in tempo reale.
Per ottenere ciò occorre utilizzare moduli di interfaccia già disponibili oppure realizzarli in un linguaggio che permetta di programmare in modo rapido l'interfaccia che consente di ottenere l'interazione fra i software specialistici finalizzati alla progettazione.
I software impiegati allo scopo sono: il visualNastran 4D (della MSC Software) per la simulazione e l'analisi dei cinematismi, il Matlab (della Math Works) per l'elaborazione dei dati ricavati dalla simulazione in visualNastran e di tutte le modalità di controllo, il Simulink per la simulazione del comportamento dinamico di un sistema di movimentazione finalizzato alla progettazione delle modalità di controllo, lo State Flow per la simulazione del comportamento dei sistemi a "stati finiti", il LabVIEW (della National Instruments) per la realizzazione di una supervisione che consenta di rendere operative anche modalità di controllo già progettate.
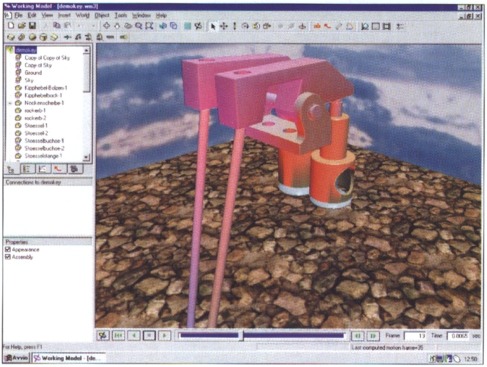
Simulazione di un sistema meccanico complesso
in movimento in ambiente visualNastran
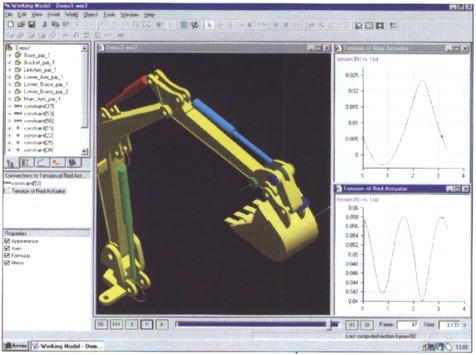
VisualNastran 4D permette di simulare il reale funzionamento dei cinematismi che realizzano la movimentazione.
Al fine di ottenere in "realtà virtuale" anche la visione dell'apparecchiatura è necessario ricavare separatamente un modello CAD (via IGES, STL, STEP, ACIS e Parasolid) e importarlo direttamente nel programma del visualNastran. Se il CAD di partenza è Solid Edge, SolidWorks, Mechanical Desktop, Inventor o Pro/E non è necessario effettuare alcun import/export di files, poichè il menù di visualNastran compare all'interno del CAD stesso.
VisualNastran 4D è un programma di simulazione dinamica tridimensionale, che trasferisce il mondo reale della meccanica dei cinematismi sullo schermo di un personal computer, mentre la semplice e potente interfaccia grafica costruisce gli scenari e le simulazioni del moto.
Il concetto operativo del programma è basato sull'individuazione dell'insieme di corpi rigidi e dei vincoli (giunti, motori, attuatori, molle) che realizzano la movimentazione, sul loro assemblaggio attraverso una libreria grafica e sulla loro caratterizzazione attraverso un menù.
Le elaborazioni che portano al tracciamento di tutte le variabili coinvolte nella movimentazione sono effettuate senza ulteriori interventi da parte dell'operatore.
Le caratteristiche fisiche di ciascun elemento che realizza il cinematismo vengono definite in modo semplice e diretto tramite un menù, e così pure quelle dei vincoli fisici (giunti, funi, molle, ecc.) e degli agenti esterni (forze di gravità, coppie e forze esplicate dagli attuatori, ecc.).
I vincoli cinematici sono risolti senza ulteriori impegni di programmazione. Le unità di misura sono fissate da menù.
Una barra di controllo della simulazione permette di intervenire dall'esterno sull'evoluzione e sulle modalità di rappresentazione del sistema di movimentazione.
I risultati sono forniti in forma grafica in tempo reale e riguardano: velocità accelerazione, posizione, momenti, orientazioni, velocità angolari, accelerazioni angolari, forze, coppie di attrito e di contatto.
In effetti, oltre a queste voci di menù standard, qualunque altra proprietà degli elementi oggetti di simulazione in visualNastran, come ad esempio il colore, la massa ed il coefficiente di attrito, può essere chiamata, misurata, elaborata e modificata interattivamente nel corso dell'elaborazione da un'opportuna funzione del linguaggio del software, opportunamente documentata.
È possibile effettuare l'elaborazione dei dati ottenuti dalla simulazione, tramite procedure opportunamente definite.
Tutte le variabili coinvolte nella movimentazione possono essere memorizzate in modo da rendere possibile il salvataggio di qualsiasi animazione.
Il visualNastran 4D consente poi l'animazione fotorealistica dinamica in ray tracing del sistema di movimentazione, con luci, ombre, riflessi, finiture superficiali e texture applicate ai vari oggetti per la creazione di simulazioni di sorprendente realismo.
Infine, la possibilità di analisi agli elementi finiti integrata durante la simulazione consente di vedere le sollecitazioni e le deformazioni conseguenti nei componenti del sistema di movimentazione, visualizzate durante l'analisi cinetodinamica, rendendo quindi ragione dell'effettiva vita attesa per l'impianto.
Matlab è un linguaggio interpretato, che consente di effettuare una gamma molto vasta di elaborazioni utilizzando macroistruzioni, facili da interpretare e utilizzare. I risultati sono forniti in forma grafica secondo varie modalità.
Utilizzando le macroistruzioni possono essere realizzate procedure finalizzate a particolari elaborazioni, che ampliano l'insieme delle microistruzioni di base.
L'insieme delle macroistruzioni comprende, fra l'altro, tutte le procedure di base per l'analisi dell'evoluzione di un sistema dinamico, per la individuazione del modello matematico a partire dai dati e dall'andamento delle variabili coinvolte nell'evoluzione del sistema da modellizzare, per la progettazione delle modalità di controllo, sia convenzionali sia evolute.
Le macroistruzioni sono selezionate a seconda delle finalità e organizzate in Toolbox. Alcune Toolbox sono utilizzate per la progettazione dei "controllori intelligenti".
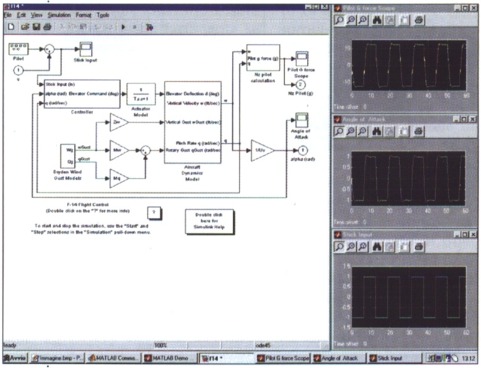
Simulazione dell'assetto di volo di un F14
attraverso Simulink di Matlab
Per la simulazione del comportamento dinamico di un sistema complesso, in funzione del comportamento statico e dinamico degli elementi che lo costituiscono, può essere utilizzato il Simulink, che opera nell'ambiente Matlab. Per poterlo utilizzare correttamente occorre avere preventivamente effettuato una suddivisione in blocchi funzionali del sistema da analizzare ed aver caratterizzato il comportamento dei singoli blocchi attraverso un modello statico e dinamico, formulato in modo che un numero limitato di parametri possa caratterizzarne il comportamento.
La connessione dei singoli blocchi è effettuata attraverso un linguaggio grafico, molto simile a quello utilizzato per la rappresentazione classica degli schemi a blocchi.
I risultati sono forniti in forma grafica e possono essere scambiati con il Matlab senza ulteriori elaborazioni.
Il Simulink è estremamente utile per l'analisi del comportamento globale di un sistema a partire dalla conoscenza del comportamento dei singoli sottosistemi che lo compongono, per la verifica della validità di una modalità di controllo, per l'analisi di possibili condizioni operative al verificarsi di eventi particolari (presa di carico abnorme, rottura di un componente, variazione di uno dei parametri caratterizzanti il comportamento statico o dinamico).

Simulazione della trasmissione meccanica di un'automobile
attraversop la toolbox Stateflow di Matlab
Lo State Flow è un linguaggio in cui ogni blocco rappresenta la modalità di comportamento dell'elemento coinvolto nell'evoluzione di un sistema "a stati finiti" e ogni arco orientato individua il passaggio da uno stato a quello successivo. I singoli stati vanno definiti tenendo conto sia della funzionalità che si vuole raggiungere, sia dei vincoli che devono essere rispettati per ottenere il corretto funzionamento del sistema che deve essere controllato.
LabVIEW è un ambiente per lo sviluppo rapido di applicazioni e si può considerare come alternativo ad altri strumenti RAD (Rapid Application Development) come il Visual Basic.
La caratteristica fondamentale del LabVIEW rispetto agli altri ambienti di sviluppo č l'uso di un linguaggio di programmazione grafico, detto linguaggio G, un linguaggio simile a quello utilizzato negli schemi dei circuiti stampati per la creazione di applicazioni utilizzando schemi a blocchi invece che linee di codice.
Nell'ambiente di programmazione LabVIEW è contenuta una serie di librerie di funzioni che possono essere utilizzate per realizzare un qualsiasi tipo di programma, per un qualsiasi grado di complessitŕ: dalla supervisione del sistema di controllo della singola movimentazione, all'applicazione per l'acquisizione di dati dal campo, al controllo di interfaccia per strumenti basati su bus IEE488, all'analisi dei dati in tempo reale, alla presentazione dei dati su interfacce utente di tipo standard.
LabVIEW può essere utilizzato per rendere operative leggi di controllo di tipo standard come PID o di tipo innovativo come quelle basate su logica fuzzy o sulle reti neurali.
La grande potenzialità del LabVIEW è dovuta alla crescente standardizzazione del mercato dei componenti di interfacciamento verso i sistemi da controllare, che vengono sempre più spesso forniti compatibili ai tools di National Instruments.
Alcune librerie presenti in LabVIEW consentono la realizzazione di modalità di controllo di tipo continuo e sequenziale, con prestazioni simili a quelle dei singoli dispositivi che realizzano un PID ed un PLC, con enorme vantaggio in termini di flessibilità e di manutenzione.
Sia il Matlab sia il LabVIEW consentono di realizzare animazioni in "realtà virtuale" utilizzando i dati disponibili durante l'elaborazione.
Simulazione di un braccio meccanico
e analisi dinamica in ambiente LabView
VisualNastran, Matlab (con estensione Simulink e State Flow) e LabVIEW possono essere resi operativi su un personal computer in cui il vincolo principale è costituito dalla memoria disponibile, dalla velocità di elaborazione del processore e dalla capacità di accelerazione grafica OpenGL della scheda grafica per rendere più vivace l'animazione 3D.
VANTAGGI E INTEGRAZIONE
VisualNastran e Matlab tendono a rappresentare uno standard a livello di analisi del comportamento statico e dinamico di un sistema complesso e di sintesi delle modalità di controllo. Mediante LabVIEW si tende ad unificare il supporto software per la realizzazione della supervisione.
In definitiva, si può affermare che visualNastran 4D è un programma molto efficace di analisi tramite simulazione del comportamento di cinematismi complessi.
Movimentazione coordinata
in ambiente visualNastran
La semplicità dell'interfaccia grafica permette di svincolarsi dalla formulazione analitica del modello matematico delle singole parti e di realizzare un progetto CAD del sistema, prendendo in considerazione solo le caratteristiche meccaniche e la funzionalità delle singole parti. L'animazione 3D consente di ottenere la visione efficace in "realtà virtuale" e di seguire facilmente l'evoluzione della movimentazione nel tempo. VisualNastran 4D permette di includere nella simulazione controlli di tipo sequenziale, ossia PLC, ma non di tipo continuo, come per esempio i PID, largamente utilizzati nel controllo a controreazione della movimentazione di un singolo asse.
A tale carenza può sopperire allora una semplice routine esterna in Visual Basic o in Matlab, purchè i due ambienti di simulazione siano in grado di scambiarsi i dati in tempo reale.
Matlab è senza dubbio lo strumento software matematico più indicato per la progettazione delle modalità di controllo.
Questo software richiede da parte dell'utente la conoscenza delle procedure per la progettazione delle modalità di controllo ed un a competenza specifica in tale settore. Le varie demo ed i manuali di istruzione, disponibili per ogni toolbox, semplificano molto l'autoapprendimento.
L'interazione di diversi ambienti software è permessa dal protocollo d'interfaccia OLE (Object Linking and Embedding - collegament ed inclusione oggetti) di Microsoft Windows per l'integarzione di componenti. Per poter scambiare dati in tempo reale tra due diverse applicazioni, occorre che entrambe siano provviste di interfaccia OLE.
Utilizzando il Visual Basic per la realizzazione di un'interfaccia software, è possibile scambiare dati in tempo reale fra Matlab e visualNastran. Il Visual Basic è adatto allo scopo, poichè il Matlab permette la comunicazione verso altri software unicamente con un protocollo di comunicazione chiamato DDE (Direct Data Exchange), caratteristico del Windows, mentre visualNastran utilizza l'OLE, ed il Visual Basic è in grado di comunicare con tutti e due i protocolli).
La versione 6.3 del visualNastran 4D, commercializzata dal dicembre 2000, ha aggiunto una nuova potenzialità a questa interfaccia, in quanto Matlab vede ora il visualNastran come un suo blocco e non necessita più del tramite del Visual Basic per la comunicazione reciproca. Visual Basic può così gestire il collegamento tra l'accoppiata visualNastran/Matlab con altri e diversi software.
.Il visualNastran 4D, attarverso la sua modularità è un software molto indicato per la simulazione dei protocolli di connessione, nel campo dell'automazione, dove, una volta identificati uno o più server e client, occorre stabilire le leggi che governano la comunicazione bidirezionale dei vari apparati per l'ottimo funzionamento del sistema.
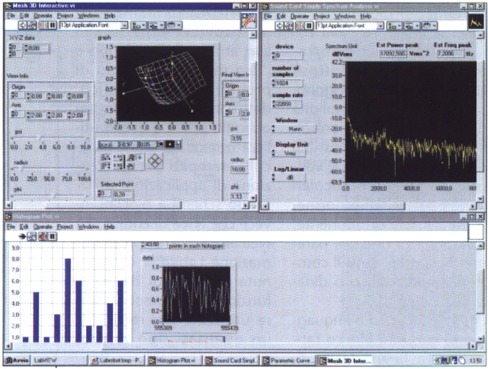
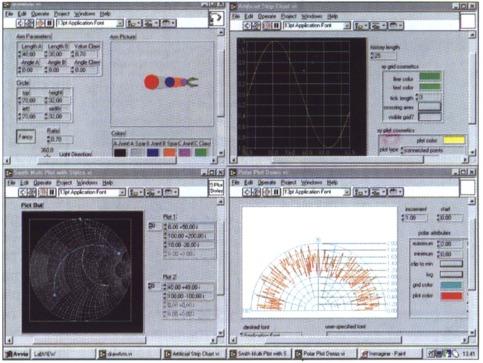
Analizzatore di spettro di frequenza
in ambiente LabVIEW
Attraverso l'uso di LabVIEW è possibile simulare un sistema di comunicazione digitale, seriale e bidirezionale, in grado di collegare in rete locale i singoli apparati a livello di campo con il supervisore.
Nella prima figura di questa pagina sono rappresentate le iterazioni fra i linguaggi utilizzati nella movimentazione controllata nonchè il loro impiego nella progettazione, nella simulazione e nella realizzazione del sistema controllato.
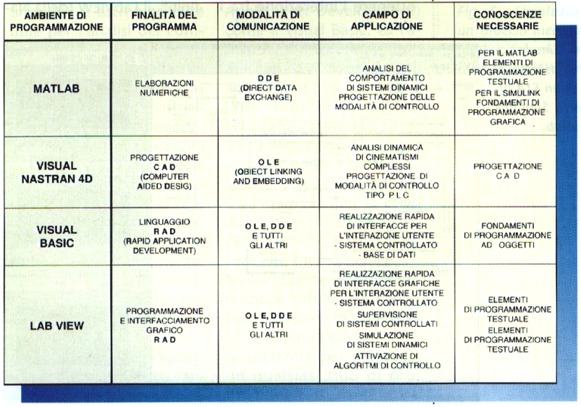
Nella seconda figura sono invece evidenziate le peculiarità di ognuno. Nelle altre figure sono illustrati alcuni esempi di applicazione dei software presentati in questo articolo a problemi collegati alla movimentazione.
Con la presentazione dei software per la progettazione dei sistemi di movimentazione, si è voluto fornire al progettista una visione dei nuovi strumenti che consentono di passare da un approccio empirico ad uno basato su procedure, e che consentono di ottenere prestazioni di qualità superiore a quelle di tipo convenzionale, basate sull'improvvisazione e la messa a punto della modalità di controllo durante il funzionamento.
Una movimentazione multiasse può essere vista anche come un esempio di sistema complesso, che attualmente non potrebbe essere progettato in maniera efficace senza l'utilizzazione di strumenti che consentano:
La progettazione tramite simulazione è preliminare alla realizzazione ed è intesa ad individuare modalità di controllo innovative che consentano di elevare in modo significativo la qualità delle prestazioni.
Il nuovo approccio richiede ovviamente l'acquisizione di nuove conoscenze, ma ciò è indispensabile se si vuole progredire ed introdurre innovazioni per restare competitivi sul mercato.
Articolo del prof. Alessandro De Carli e Luigi Paris
del Dipartimento di Informatica e Sistemistica dell'Università degli Studi di Roma "La Sapienza",
pubblicato nel numero di maggio 2001 della rivista "Il Progettista Industriale"
e riprodotto per autorizzazione dell'editore Tecniche Nuove".
In corsivo testo non presente nell'articolo pubblicato nella predetta rivista.
ALTRI 83 CASI IN SETTORI DIVERSI !
