Raccolta casi Working Model, visualNastran & SimWise - Controlli innovativi per imballi di detersivo

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
CONTROLLI INNOVATIVI PER IMBALLI DI DETERSIVO
Esempio di controllo intelligente di robot presso la MVM Automazioni di Caselle di Altivole (TV)
Il team del prof. Alessandro De Carli del Dipartimento di Informatica e Sistemistica dell'Università di Roma "La Sapienza", ed in particolare il neoingegnere Fabio Gallinaro, ha approfondito la conoscenza del controllo già installato di un robot cartesiano a due assi ed ha valutato l'opportunitŕ di introdurre varie modifiche grazie all'uso integrato di visualNastran e Matlab/Simulink.

1. Descrizione del modello visualNastran
Il progetto qui presentato interessa un impianto in funzione presso la MVM Automazioni di Caselle di Altivole (TV).
Si tratta di approfodire la conoscenza del controllo già installato di un robot cartesiano a due assi, battezzato 1PK, e valutare l'opportunità di introdurre modifiche.
Lo scopo è quello di controllare il moto della testa del robot lungo la traiettoria riportata in bianco in figura 1.
Tale traiettoria è quella relativa al particolare ciclo di lavoro che si è andato a studiare e la cui durata è di 5 secondi: dopo 0.7 secondi necessari alla chiusura delle pinze della testa del robot per sollevare nove fustini di detersivo, L'1PK si porta dalla posizione di presa a quella di deposito. Deposita i fustini in scatole di cartone (tre per ogni scatola) e torna nella posizione di presa per prelevare i successivi nove fustini. Variando questo ciclo, anche la traiettoria descritta dalla testa dell'1PK varierà pur essendo vincolata a svilupparsi nell'area delimitata dalla linea rossa (ancora figura 1).
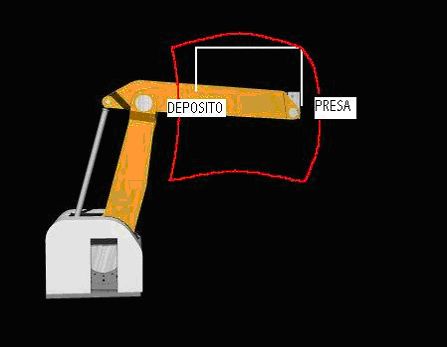
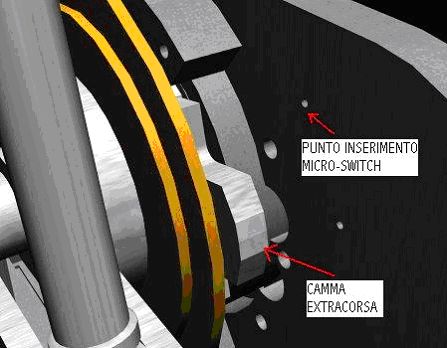
Qualora la suddetta traiettoria venisse a toccare punti del piano esterni all'area in questione, una delle due camme extracorsa (figura 2) verrebbe a trovarsi sotto il relativo micro switch e la movimentazione si arresterebbe. Allo stato attuale del lavoro, il micro non è stato ancora inserito, tuttavia, in figura, è evidenziata la posizione in cui esso verrà montato.
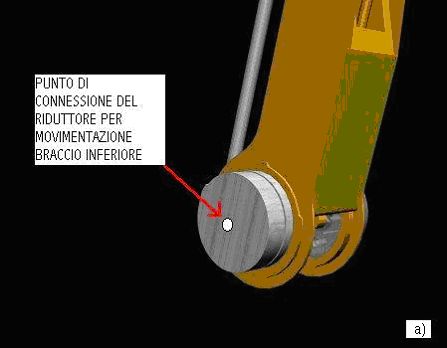
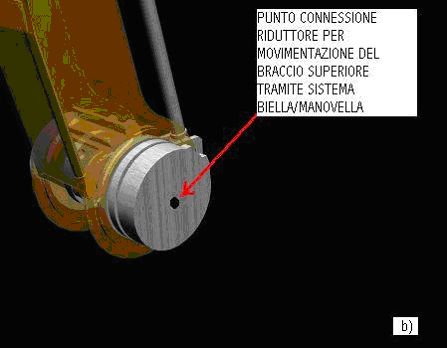
La movimentazione del robot è realizzata tramite due motori brushless. Ognuno di essi è collegato ad un riduttore ad ingranaggi con k=89. I due riduttori sono a loro volta collegati nei punti indicati nelle figure 3 a) e b).
Affinchè la testa dell'1PK descriva effettivamente la traiettoria riportata in figura 1, entrambi i motori devono essere continuamente in movimento secondo leggi di velocità che sono state determinate tramite l'analisi del modello applicato alla realtà come si dirà nella sezione successiva.
Se, infatti, si tentasse di far descrivere al robot la suddetta traiettoria facendo muovere un motore per volta, la testa descriverebbe segmenti curvilinei e non rettilinei.
Questo è dovuto al modo in cui è stata realizzata la struttura meccanica del robot che garantisce, inoltre, che la testa dell'1PK mantenga sempre lo stesso orientamento.
In figura 4 viene rappresentato, infine, il robot in un istante particolare del suo ciclo di lavoro.

2. Schema Simulink di Controllo di Velocitŕ Tramite PID con Supervisione Fuzzy
Nella figura 5 č riportato l'intero schema Simulink di controllo implementato per il robot 1PK.
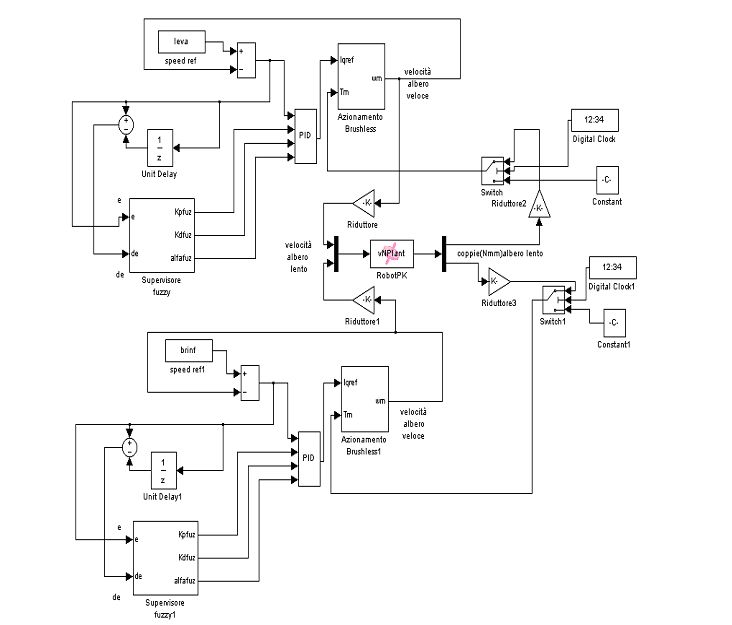
Trattasi, in sostanza, dei due anelli di controllo delle velocità dei due motori.
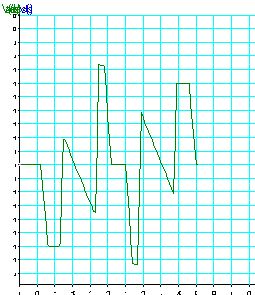
I profili delle velocità angolari di riferimento sono stati determinati facendo descrivere al modello visualNastran del robot 1PK la traiettoria ideale rappresentata in figura 1.In sostanza si è riprodotto tramite visualNastran, il comportamento della scheda assi Siemens montata sull'impianto.
Questa, sulla base delle misure di posizione degli assi dei due motori riportate da due encoder simulati, calcola, applicando due complesse trasformazioni, i corrispondenti valori di riferimento di velocità angolare per i due motori.
I riferimenti in questione, ottenuti tramite visualNastran, sono riportati nella figura seguente.
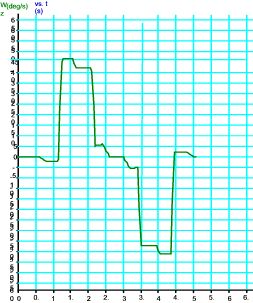
e di quello per la movimentazione del braccio superiore
Lo schema riproduce (anche se allo stato attuale non ancora perfettamente) il reale controllo, tramite PID, implementato per l'1PK dalla Control Techniques tramite il controllore DIGITAX.
Il blocco Azionamento Brushless, riportato in figura 6, contiene l'anello di corrente.
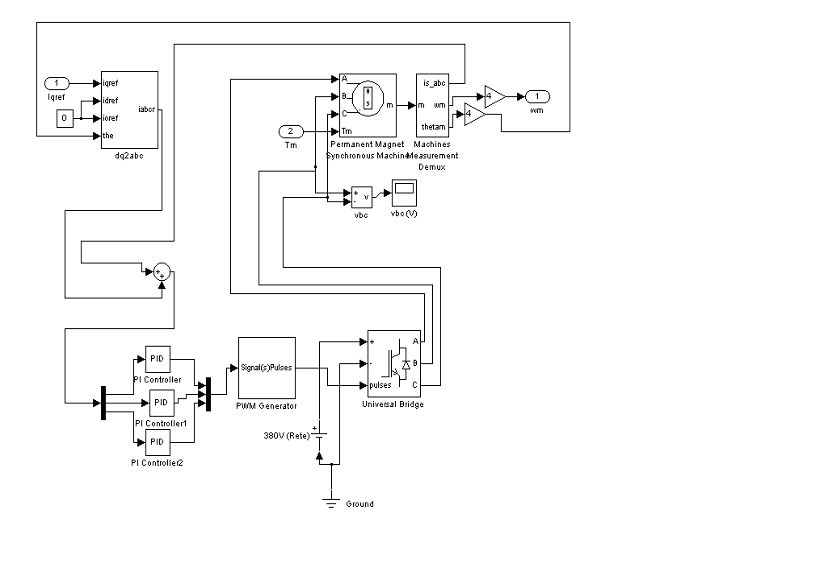
In funzione della componente in quadratura della corrente di riferimento (uscita del controllore PID nell'anello di velocità), e dell'angolo dell'asse del motore, vengono calcolate le correnti di riferimento dei tre avvolgimenti del brushless.
Confrontandole con le correnti attuali negli avvolgimenti, una volta calcolati gli errori di corrente, si ottengono, in uscita ai tre controllori PI, tre segnali che costituiranno le modulanti per la modulazione PWM.
I segnali elaborati da questo procedimento di modulazione, controllano i sei IGBT costituenti il ponte a tre rami ad IGBT/Diodi che eccita gli avvolgimenti del motore brushless.
La novità presentata nel lavoro svolto, consiste nell'introduzione di un supervisore fuzzy nell'anello di velocità che, sulla base del valore dell'errore di velocitŕ e(k) e della sua variazione e(k)-e(k-1), aggiorna dinamicamente i valori dei guadagni proporzionale, integrale e derivativo.
Sono stati adoperati tre blocchi Simulink che implementano ognuno un sistema di inferenza fuzzy.
Ognuno di essi ha come ingressi l'errore di velocità e la sua variazione e per ogni ingresso sono state usate 7 Membership Functions (MF).
Le uscite di due dei tre blocchi FIS (Fuzzy Inference Systems) - in particolare quelli che permettono di calcolare i guadagni proporzionale e derivativo - sono coefficienti tra zero e uno ( a cui sono associate due MF) che saranno inseriti nelle formule che permettono di calcolare Kp e Kd. Il terzo blocco FIS produce in uscita un valore tra due e cinque in funzione del quale, e dei valori calcolati per Kp e Kd, viene calcolato il guadagno Ki.
3. Vantaggi Ricavati dall'Uso del visualNastran
Il principale vantaggio derivato dall'uso del visualNastran, oltre a quelli concretamente raggiunti nel caso specifico, è di tipo metodologico e consiste nel poter inserire il modello virtuale direttamente nell'anello Simulink senza dover realizzare alcuna interfaccia, rendendo il lavoro sicuramente più omogeneo rispetto a quanto risulterebbe dall'uso dei due programmi separatamente.
OTHER 83 DIFFERENT APPLICATIONS !
ALTRI 83 CASI IN SETTORI DIVERSI !
