Raccolta casi Working Model, visualNastran & SimWise - Laminazione intelligente con il visualNastran

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
LAMINAZIONE INTELLIGENTE CON IL VISUALNASTRAN
ottimizzazione del controllo di laminazione a freddo per fogli di alluminio
Il team del prof. Alessandro De Carli del Dipartimento di Informatica e Sistemistica dell'Università di Roma "La Sapienza", ed in particolare il neoingegnere Fabio Plebani, ha sviluppato l'ottimizzazione del controllo di laminazione a freddo per fogli di alluminio in un impianto industriale.
Lo scopo del lavoro qui presentato è stato quello di introdurre alcune metodologie innovative per la realizzazione di una strumentazione virtuale in grado di effettuare sia la misura di grandezze fisiche non rilevate, sia di variabili a cui non corrisponde una grandezza fisica.
Alla stessa è stato affidato il compito di effettuare la valutazione di entità astratte facilmente collegabili alla qualità delle prestazioni e all'efficienza del sistema controllato, sia esso un apparato, un impianto o addirittura un sistema di produzione, e di come utilizzarli nel miglioramento delle prestazioni stesse.
La realizzazione di una strumentazione virtuale costituisce un'ulteriore innovazione nell'Automazione Industriale e fornisce un valido ausilio nel coordinamento e nella conduzione delle azioni di controllo.
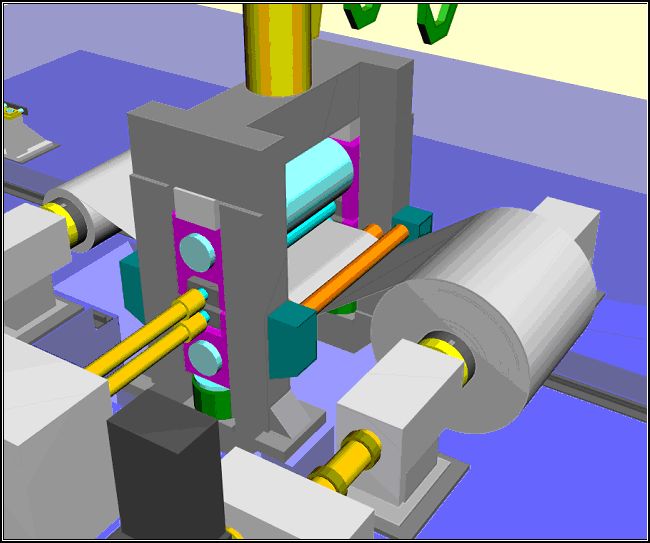
La strumentazione di cui si parla è stata realizzata con l'ausilio del software visual Nastran e riguarda la movimentazione meccanica pluriasse di un laminatoio "foil" per la laminazione di fogli di alluminio di spessore dell'ordine del micron.
La movimentazione automatica in questione si trova presso lo stabilimento "VAW slim S.p.a." di Via R.S. Reynolds 18, 04012 Cisterna di Latina.
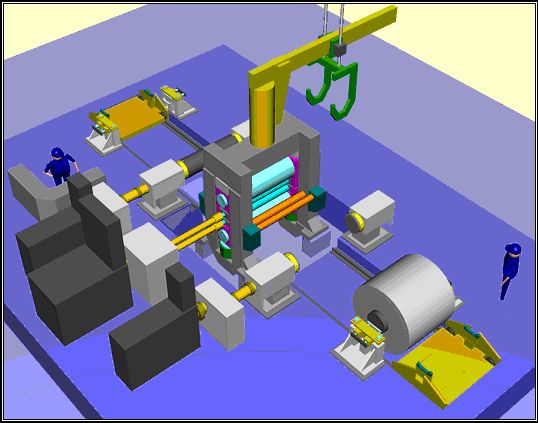
Una volta realizzato il modello CAD della macchina si è allocata sullo stesso tutta la sensoristica necessaria per poter effettuare una simulazione del ciclo produttivo.
Quindi, è stato realizzato un programma in Visual Basic che simula il controllo PLC della movimentazione.
Lo stesso è stato implementato attraverso l'interfaccia OLE Automation sul modello meccanico.
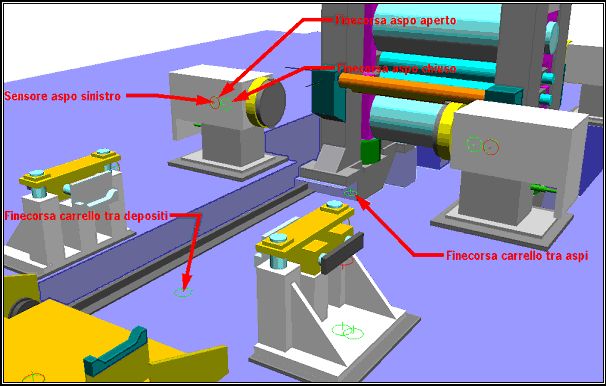
Il ciclo di funzionamento si può riassumere in:
1) Ciclo di carico rotolo da laminare
2) Ciclo di laminazione:
3) Ciclo di scarico rotolo laminato:
Successivamente, con i dati reperiti sui manuali dei motori in corrente continua, è stato costruito un modello linearizzato dei motori stessi e del carico meccanico in ambiente SIMULINK di MATLAB, per l'analisi delle grandezze elettriche e la validazione dei modelli nei due diversi ambienti.
L'utilizzo di un modello in un ambiente come il visual Nastran è stato molto utile, oltre che assai vantaggioso, per il calcolo di tutte le caratteristiche dinamiche del sistema di natura non lineare, come:
Avendo a disposizione un modello completo del laminatoio e di tutti i sui attuatori, che sia in grado di tener sotto controllo sia le grandezze meccaniche sia le grandezze elettriche, si hanno di conseguenza tutte le informazioni necessarie per poter gestire, analizzare ed eventualmente modificare le azioni di controllo implementate dal PLC o da chi per lui ne realizza tale fase.
Inoltre, disponendo di due potenti ambienti software, come quelli già citati, è stato possibile confrontarne le caratteristiche ed osservare come i transitori siano diversamente rappresentati sul modello meccanico, in quanto capace di considerare i fenomeni di natura secondaria, non facilmente modellizzabili in SIMULINK.
Potendo interfacciare i due ambienti ed essendo il MATLAB potentissimo nelle elaborazioni matematiche, vi si è realizzata l'azione di controllo in coppia e velocità, prelevando i riferimenti e le variabili controllate sul modello meccanico e restituendo sullo stesso i forzamenti elaborati su strutture in logica convenzionale.
L'intero sistema è governato da leggi di controllo che hanno come riferimento i profili di velocità reali della movimentazione coordinata, imposti dagli SCR che comandano i motori in corrente continua.
Disponendo inoltre della toolbox "FUZZY" di MATLAB, si è potuto realizzare un controllo implementato in logica sfumata fuzzy, per il confronto delle sue prestazioni nei riguardi di quello realizzato in logica convenzionale.
Da quanto visto si è potuto affermare con estrema certezza che il visual Nastran combina le più avanzate tecnologie per la simulazione del movimento di carichi meccanici, attraverso sofisticati strumenti professionali per la simulazione ingegneristica, inoltre permette il controllo in tempo reale di tutte le movimentazioni tramite l'interfaccia con il SIMULINK di MATLAB.
Il motore della simulazione dinamica trasferisce inoltre il mondo reale della meccanica Newtoniana sul desktop del computer, mentre la semplice ma potente interfaccia grafica costruisce gli scenari e le situazioni dell'esperimento.
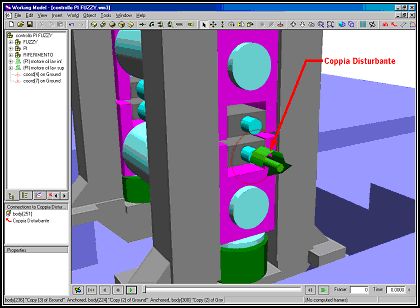
Volendo in conclusione dotare la macchina di un'intelligenza mirata, relativa ai guasti di natura incipiente, riguardanti in principal modo le cricche instauratesi sui cuscinetti dei cilindri della gabbia di laminazione, per altro soggetti a continue sollecitazioni di natura correttiva nei confronti dello spessore e della planarità del foglio di alluminio, l'obiettivo viene raggiunto attraverso una successione di passi:
Avvalendosi dell'esperienza acquisita e fissate le prospettive, si è passati alla parola INTELLIGENZA, intesa come flessibilità di programma e analisi dei guasti.
Questa seconda parte è stata realizzata:
Utilizzare una strumentazione virtuale per migliorare le prestazioni sfruttando una logica sfumata invece di una logica on/off, predicendo e valutando intelligentemente eventuali malfunzionamenti e/o guasti incipienti: questi i risultati conseguiti con il lavoro svolto.
ALTRI 83 CASI IN SETTORI DIVERSI !
