Raccolta casi Working Model, visualNastran e SimWise - Modellazione di una bicicletta

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
MODELLAZIONE MULTIBODY DI UNA BICICLETTA DA FREE RIDE
L'ing. Federico Giubilato della Giubilato Cicli srl ha sviluppato la modellazione multibody con visualNastran e SimWise di una delle biciclette da free ride della omonima casa costruttrice.
Ecco una breve sintesi dell'impostazione iniziale della ricerca.
1-INTRODUZIONE
L’enorme offerta che ai giorni nostri si può trovare nel mercato delle mountain bike può essere riassunta in tre macro categorie: biciclette da Down Hill (fig.1), biciclette da free ride/all mountain, biciclette da Cross Country (fig.2).


Fig.1 - A sinistra, esempio di bicicletta da Down Hill e Fig.2 - A destra, esempio di bicicletta da Cross Country
Le prime sono biciclette specifiche per le discipline discesistiche estreme, sono caratterizzate da escursioni della forcella e dell’asse ruota posteriore attornio ai 200mm; la loro destinazione d’uso impone determinate caratteristiche di restistenza degli organi meccanici che la compongono comportando un peso totale della bicicletta di circa 20 kg il che rende molto difficoltoso pedalare in salita con questa tipologia di bicicletta.
Ad una destinazione d’uso opposta sono dedicate le biciclette da cross country le quali hanno come primo parametro progettuale la massimizzazione della performance in salita off road. Possono essere rigide con sola forcella ammortizzata con escursione di 80/100 mm oppure presentare anche un sistema di sospensione posteriore con escursione verticale dell’asse ruota di circa 100mm; il loro peso è molto contenuto e puň scendere anche al di sotto dei 10 kg per le soluzioni più spinte. Durante il loro utilizzo si nota una grande reattività nei tratti in salita ma la limitata escursione delle sospensioni introduce dei limiti nei tratti di discesa in particolar modo se questi sono caratterizzati da passaggi tecnici.
Tra queste due tipologie estreme si collocano le biciclette da free ride/all mountain (la nomenclatura utilizzata per questo tipo di biciclette è molteplice, per comodità d’ora in avanti queste biciclette vengono identificate con l’appellativo “free ride”).

Fig.3 - La bicicletta free ride/all mountain oggetto della simulazione
Queste biciclette (fig.3) si sono affermate perchè forniscono un compromesso tra prestazione in salita e in discesa non limitandone l’utilizzo in nessuno dei due campi e riproponendo cosù lo spirito di libertà che ha spinto i pionieri degli anni 80 ad inventare la mountainbike.
Sono caratterizzate da escursioni della forcella e dell’asse ruota posteriore attorno ai 150mm per un peso complessivo della bicicletta di circa 15 kg.
In molti casi gli elementi ammortizzanti sono dotati di un meccanismo che permette al biker di bloccarne il funzionamento in modo da limitare la dissipazione di energia durante la pedalata (in genere viene chiusa una valvola che gestisce la parte idraulica). le caratteristiche di duttilità stanno decretando un’affermazione crescente e grazie a discipline come il supernduro un numero sempre maggiore di neofiti si sta avvicinando alle competizioni di mountainbike.
Partendo da queste considerazioni si ` scelto di modellare in ambiente multibody una bicicletta da free ride per valutare mediante le simulazioni multibody con MSC visual Nastran 3D, ora SimWise Motion, il comportamento del sistema uomo-bici nel superamento di ostacoli caratteristici durante il moto rettilineo uniforme su superficie in piano e di valutare come le differenti tarature di forcella e ammortizzatore posteriore influenzino tale comportamento.
In questa prima fase della ricerca non si è considerato un modello sofisticato di pneumatico ne' un'analisi agli elementi finiti delle conseguenti sollecitazioni sul telaio, peraltro possibile in integrazione diretta con l'analisi cinetodinamica con il SimWise 4D, oggetto di uno sviluppo ulteriore di questa analisi.
In primo luogo è: stata eseguita la modellazione della bicicletta e sono state condotte le prime simulazioni della sola bici per verificare il corretto funzionamento del modello semplice.
Succesivamente è stato modellato anche un manichino ed assemblato il sistema uomo-bicicletta oggetto dell’indagine.
La bicicletta oggetto del modello è una “Ganna Giuby fr” (fig. 3). Presenta una forcella anteriore con 140mm di escursione ed un’escursione verticale dell’asse ruota psoteriore pari a 160mm. Il meccanismo di sospensione posteriore è un quadrilatero articolato e la ruota posteriore è assicurata alla biella del quandrilatero. La massa complessiva è di 16,24 kg.
2-SVILUPPO DEL MODELLO
2.1 INDIVIDUAZIONE DEI CORPI RIGIDI, SCELTA DELLE COPPIE CINEMATICHE E CALCOLO DEI DOF DEL SISTEMA
Bicicletta
La bicicletta č stata scomposta secondo lo schema di figura 4. La scelta delle coppie cinematiche è stata eseguita in modo da eliminare i vincoli sovrabbondanti che scaturiscono dalla modellazione del sistema spaziale con gli stessi vincoli del caso piano. I corpi rigidi considerati ed il sistema di vincoli adottato sono visibili in tabella 1. Il calcolo dei gradi di libertŕ (DOF) del sistema č stato eseguito applicando la formula di Grubler:
in cui le lettere rappresentano: nDOF = n° di gdl; m = n° corpi rigidi; A = n° vincoli rigidi; R = n° coppie rotoidali; P = n° coppie prismatiche; C = n° coppie cilindriche; S = n° coppie sferica.
Gradi di libertà: avanzamento, rollio attorno alla retta congiungente i punti di contatto pneumatici/strada, scuotimento e beccheggio.

Fig.4 - Corpi rigidi considerati per la modellazione delňla bicicletta
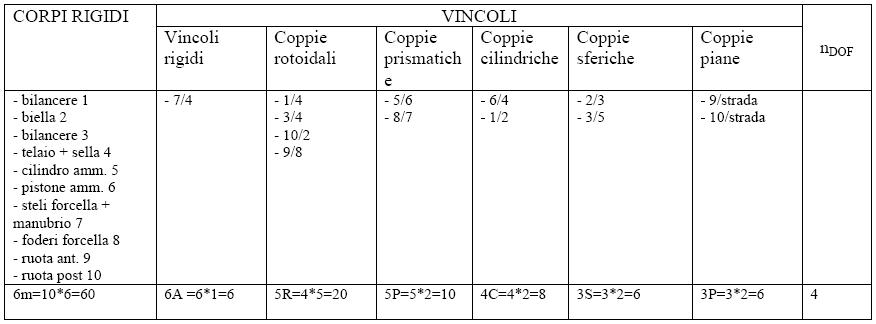
Tab. 1 - Calcolo dei gradi di libertŕ del sistema bici
Manichino
Il manichino è stato modellato basandosi sul modello del manichino di Dempster (fig. 5) ed i parametri antropometrici sono stati stabiliti sempre
sulla base delle omonime tabelle (fig. 6).
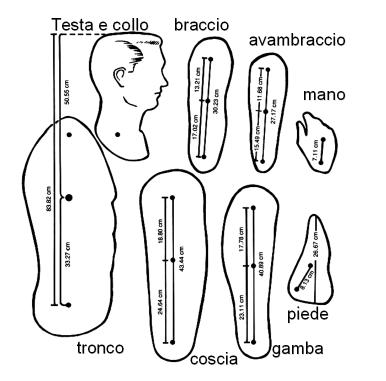
Fig.5 - Manichino di Dempster
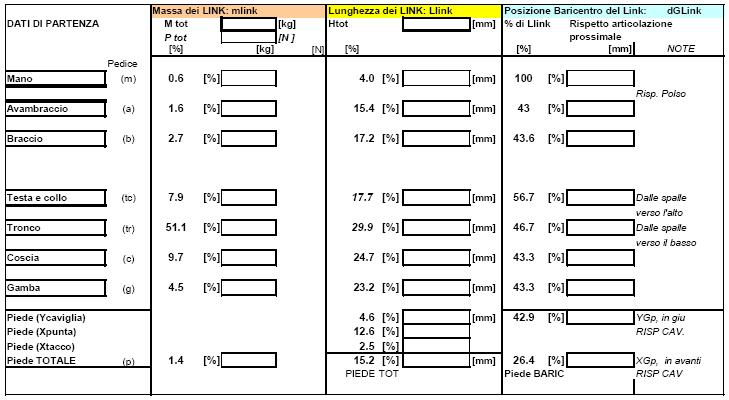
Fig. 6 - Tabelle di Dempster
Testa, collo, braccio, avanbraccio, vengono considerati come un unico corpo rigido ed vincolati rigidamente al telaio della bicicletta.
Per ciascun arto inferiore si considera il sistema cinematico composto da arto inferiore, pedivella e pedale il quale costituisce come un quandrilatero articolato con un grado di libertà rappresentato dal movimento dovuto alla pedalata. Il sistema %egravE; descritto in tabella 2.
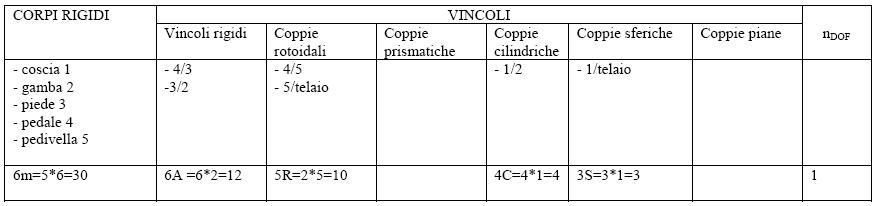
Tab. 2 - Calcolo dei gradi di libertŕ un arto inferiore
2.2 MODELLAZIONE GEOMETRICA DEI CORPI RIGIDI
Bicicletta
Come prima cosa sono state misurate le principali dimensioni geometriche della bicicletta mediante la tecnica di triangolazione.
Per ciascun corpo rigido è stata eseguita la modellazione geometrica in 3D con il software Solid Edge e il modello è stato esportato in formato IGES per poi essere
successivamente importato nel sofware multibody MSC Visual Nastran 3D. Con la versione più recente del software multibody, il SimWise, si può più velocemente sia importare i files nativi (assieme e/o parti) SolidEdge in SimWise, sia sfruttare l'integrazione diretta del SimWise che appare a menù del CAD SolidEdge (come pure in Creo, SolidWorks e Inventor).

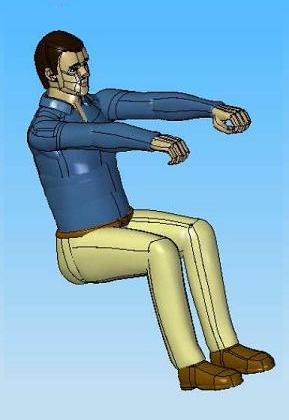
Fig.7 - A sinistra, modelli CAD di alcuni componenti delal bici e Fig.8 - A destra, manichino di partenza prima della scomposizione e del successivo assemblaggio
Manichino
È stato considerato il manichino presente nella libreria del software Pro Engineer W5 ed esportato elemento per elemento in formato IGES.
Successivamente ciascun elemento è stato ridimensionato secondo un fattore di scala 0.9545 per ottenere un’altezza totale del manichino pari a 177 cm ed importato in Visual Nastran 3D. Anche in questo caso con la versione più recente del software multibody, il SimWise, si può più si sarebbe potuto operare per integrazione diretta.
2.3 MODELLAZIONE IN AMBIENTE MULTIBODY
Modellazione sistema uomo-bici
Il modello solido di ciascun corpo rigido ` stato importato in formato IGES ed assemblato imponendo i vincoli elencati precedentemente. In primo luogo &egravE; stata assemblata la bicicletta e successivamente il manichino.
In figura 9 si puň vedere il sistema completo assemblato.
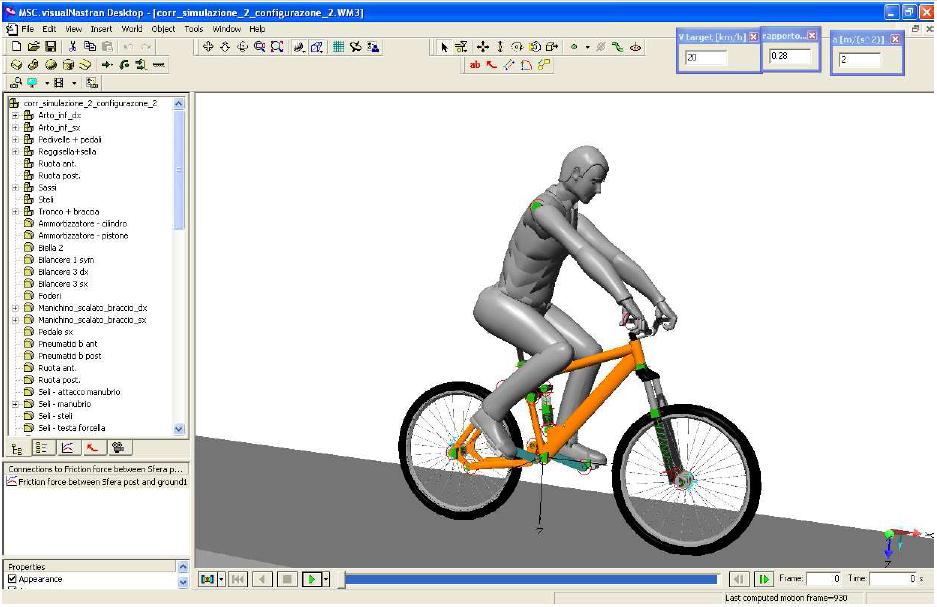
Fig.9 - Sistema uomo-bici assemblato in visualNastran - SimWise
I valori di massa attribuiti ai corpi rigidi componenti la bicicletta sono stati in parte pesati ed in parte ricavati dai cataloghi dei prodduttori dei vari componenti. Il peso dei corpi rigidi non modellati è stato spalmato nei corpi rigidi adiacenti inseriti nel modello. Anche ai corpi rigidi componenti il manichino č stata assegnata la massa secondo le tabelle di Dempster.
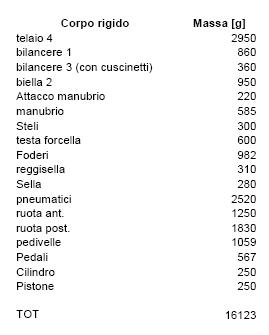
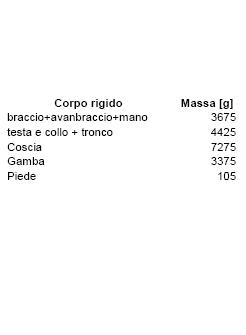
Tab. 3 - A sinistra, masse assegnate ai corpi rigidi componenti la bicicletta e Tab. 4 - A destra, masse assegnate ai corpi rigidi componenti il manichino
Alla forcella e all’ammortizzatore posteriore sono state impostate rispettivamente un’escurione pari a 140mm e 52mm.
Come sistema di controllo del moto della bicicletta è stato impostato un motore rotativo che agisce sull’asse della ruota posteriore il cui input è la velocità angolare impostata attraverso uno slider.
Il movimento delle pedivelle è gestito da un motore rotativo situato in corrispondenza del movimento centrale che riceve in input il valore di velocità angolare del motore del perno ruota posteriore moltiplicato per il rapporto di trasmizzione scelto. È stato impostato il contatto tra gli pneumatici e tutti i corpi che rappresentano la strada e gli ostacoli con un coefficiente di attrito costante a pari a 1.5 e un coefficiente di restituzione nullo.
Per garantire il moto sul piano è stato impostato un generic constraint tra il telaio della bicicletta e il ground (figura 10).
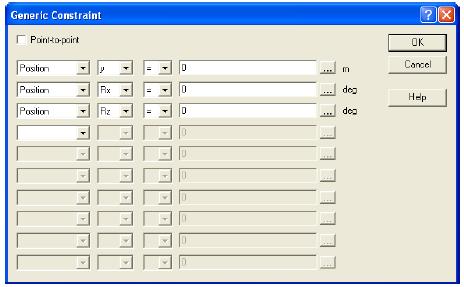
Fig.10 - Condizioni di vincolo impostate nel generic constraint
Strada e ostacoli
Strada e ostacoli sono stati costruiti con gli strumenti di Visual Nastran. Il primo ostacolo incontrato č un “bump” (fig. 11) rappresentato da un cilindro, la sua altezza č di 162 mm sopra il piano stradale, č situato a 30 m di distanza dalla posizione iniziale della bicicletta. A 20 m dal bump inizia un tratto di lunghezza 9 m con sconnessioni ravvicinate (fig. 12), chiamato “stones” per semplicitŕ, rappresentate da piccoli cilindri di diametro 80mm posti trasversalmente alla direzione di moto della bicicletta la cui superficie laterale fuoriesce per metŕ dal piano stradale. Gli assi di due cilindri adiacenti distano 300 mm. A 10 m dal termine del tratto con sconnessioni ravvicinate si trova un “drop” (salto) di 500mm di altezza (fig. 13).
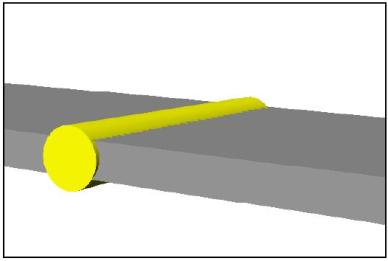
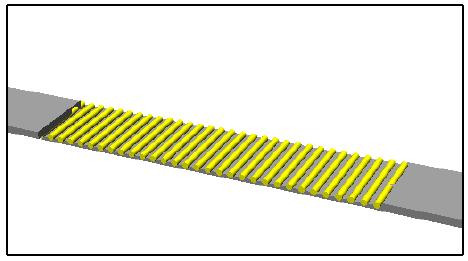
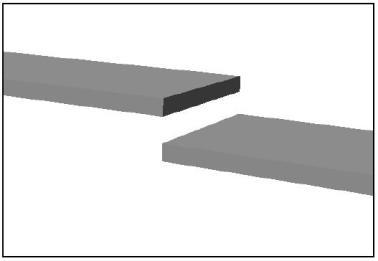
da sinistra, Fig.11 - Bump, Fig. 12 - Stones e Fig. 13 - Drop
Errori riscontrati durante le prime simulazioni
Nelle prime simulazioni si sono riscontrati i seguenti errori:
Risoluzione dei problemi e definizione del modello definitivo
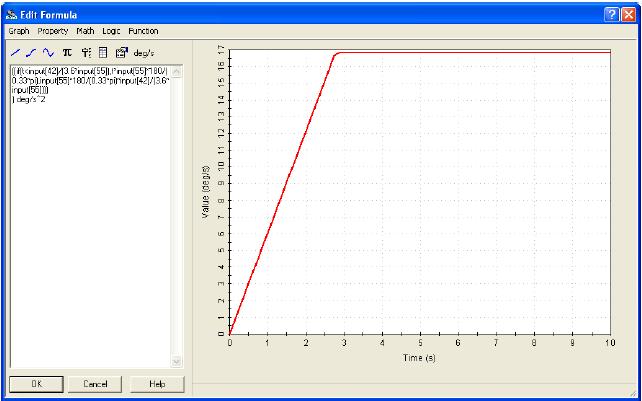
Fig.14 - Legge del moto impostata come inpu di velocità angolare del motore rotativo agente sul perno ruota posteriore
Parametri impostati per le simulazioni e grandezze misurate
Durante le simulazioni sono state mantenute costanti le seguenti grandezze:
Sono state eseguite 4 simulazioni con altrettante combinazioni di valori di smorzamento di forcella e ammortizzatore posteriore. Le rigidezze e i precarichi delle molle degli elementi ammortizzanti sono state mantenute costanti (tab. 5). I valori di rigidezza e smorzamento sono stati forniti da Mazzocchi.

Tab.5 - Valori di rigidezza e precarico delle molle di forcella e ammortizzatore posteriore adottati durante le simulazioni

Tab.6 Valori di smorzamento di forcella e ammortizzatore posteriore adottati durante le simulazioni
Le grandezze misurate durante le simulazioni sono le seguenti:
3-RISULTATI DELLE SIMULAZIONI E COMMENTI
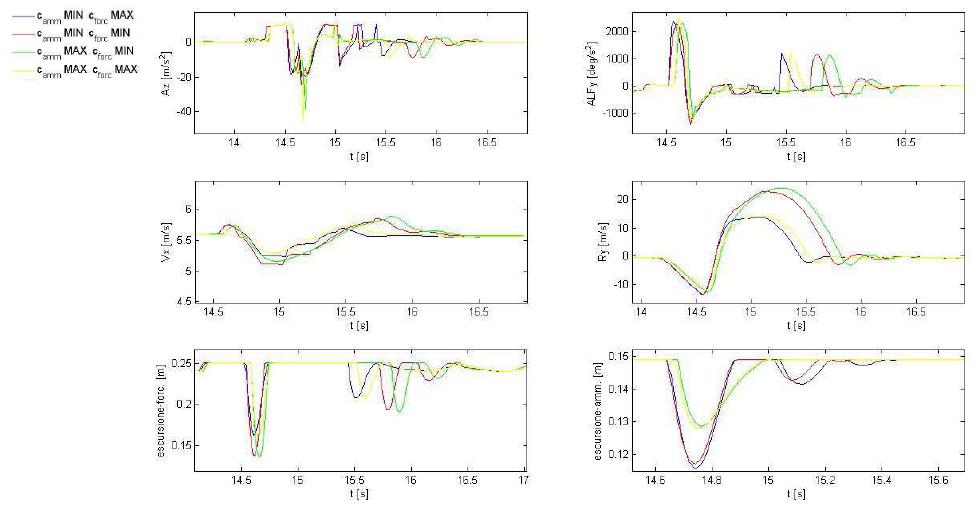
In fig. 15 si può notare l’andamento delle grandezze misurate in funzione del tempo durante le 4 simulazioni.
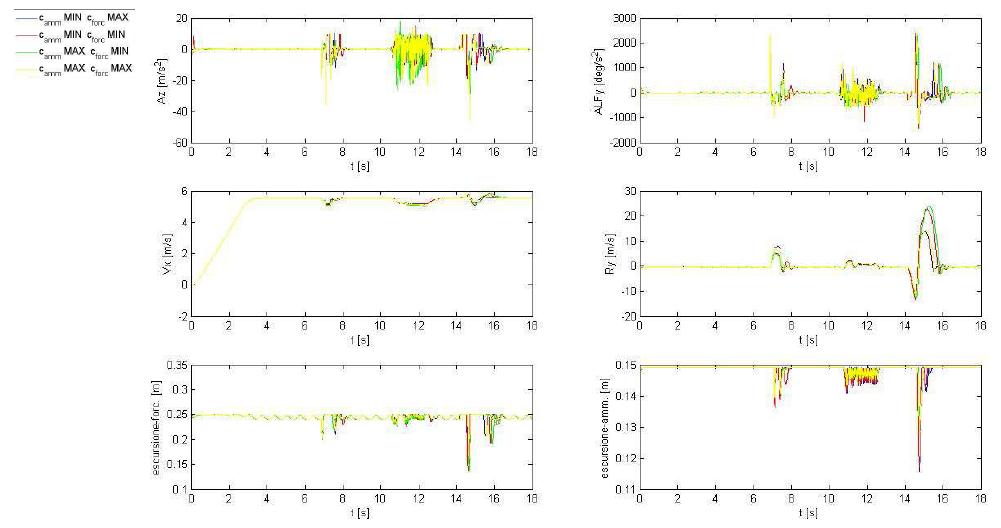
Fig.15 - Risultati ottenuti con le simulazioni
Dai grafici si possono distinguere i momenti in cui la bici affronta i tre ostacoli, ma occorre un’analisi piů dettagliata ostacolo per ostacolo. Si può fare una prima comparativa tra il comportamento della bici nelle 4 configurazioni valutando per ciascuna il valore di accelerazione efficace calcolato in corrispondenza del superamento dei tre ostacoli come segue:
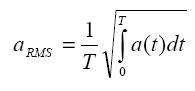
con T = periodo corrispondente al superamento ostacolo.

Tab.7 - Valori efficaci dell’accelerazione verticale del telaio misurati nel superamento dei 3 ostacoli durante le 4 simulazioni
Si ottengono valori efficaci di accelerazione verticale minori per le configurazioni con Camm MIN.
Per questa configurazione il valore di Cforc non influisce molto il comportamento globale della bicicletta.
I motivi di questo comportamento vanno ricercati nel fatto che la bicicletta nel moto uniforme in piano sia un veicolo molto sbilanciato all’indietro.
Con valori di Camm MAX il comportamento peggiora notevolmente.
Di seguito si analizzano le grandezze misurate in corrispondenza del superamento dei tre ostacoli durante le 4 simulazioni.
BUMP
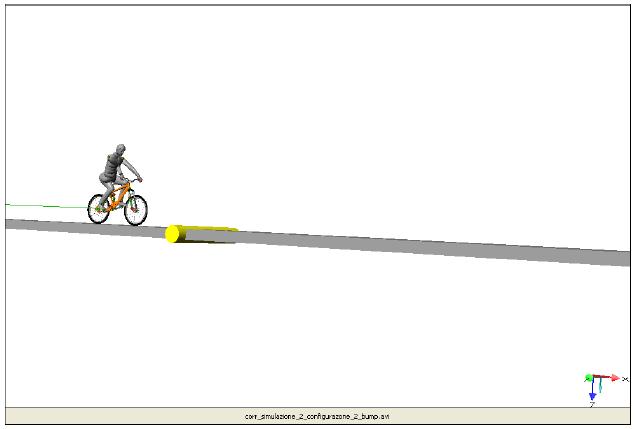
Fare doppio click sulla figura qui sopra per visionare il filmato MP4
Dal punto di vista delle accelerazioni il comportamento migliore si ottiene con valori di Camm MIN.
Dall’analisi di Ry emerge come per quel che riguarda l’impennamento il comportamento è peggiore con valori di Cforc MAX.
I dati relativi alle escursioni di forcella e ammortizzatore confermano quanto detto sopra.
Dall’osservazione dell’andamento della velocità si nota come con Camm MAX si abbia un maggior rallentamento in corrispondenza dell’incontro dell’ostacolo.
Il comportamento complessivo migliore è dato dalla configurazione di Camm MIN / Cforc MIN, questo dovuto al fatto che elevati valori di smorzamento comportano una compressione lenta di forcella e ammortizzatore non permettendo il corretto assorbimento dell’ostacolo da parte delle sospensioni.
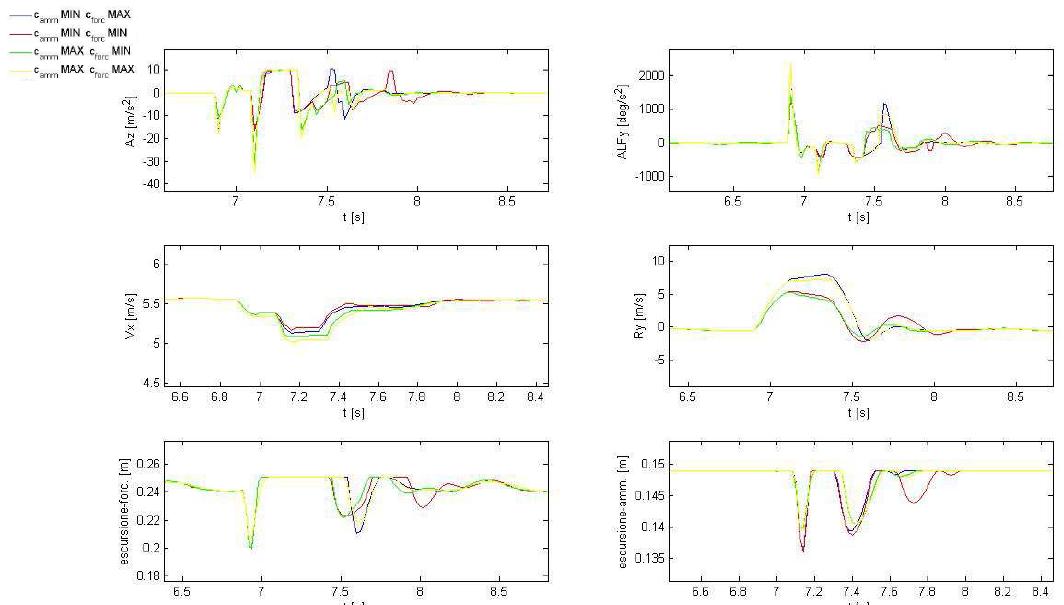
STONES
Fare doppio click sulla figura qui sopra per visionare il filmato MP4
Anche in questo caso dal punto di vista dell’accelerazione verticale il comportamento migliore si ottiene con valori di Camm MIN.
Con tale taratura si ha però un comportamento pegiore per quel che riguarda l’impennamento e l’accelerazione di becccheggio.
Dai dati relativi alle escursioni di forcella e ammortizzatore si può notare come la forcella sia poco chiamata in causa rispetto all’ammortizzatore che presenta valori di escursione minori nella configurazione di Camm MAX.
Dall’ossrvazione dell’andamento della velocità si nota come anche in questo caso con Camm MAX si abbia un maggior rallentamento in corrispondenza dell’incontro dell’ostacolo.
In questo caso si può concludere che il comportamento nel caso di asperità del fondo stradale di modesta entità poste in serie sia migliore con valori di Camm MAX.
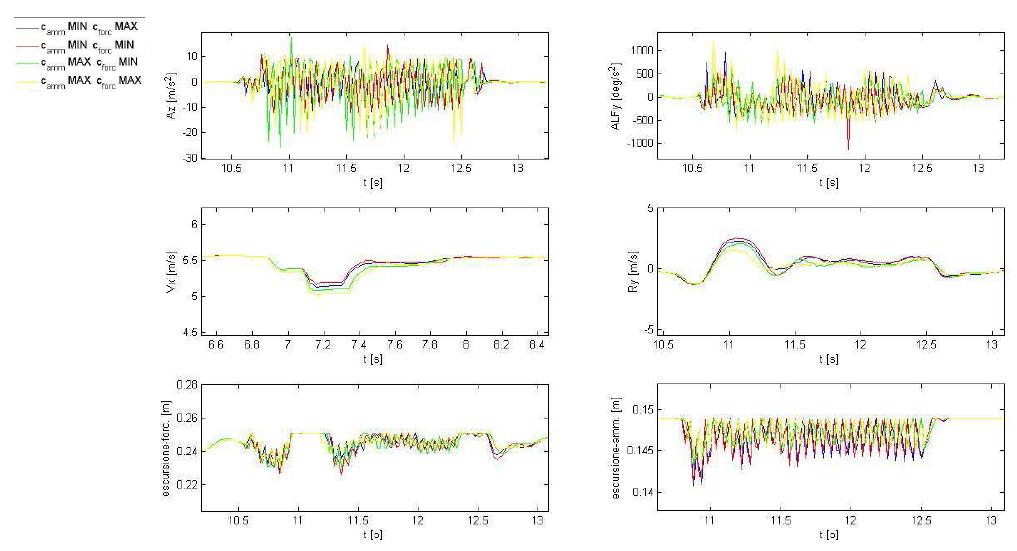
DROP
Fare doppio click sulla figura qui sopra per visionare il filmato MP4
Come visto nei casi precendenti, dal punto di vista dell’accelerazione verticale il comportamento migliore si ottiene con valori di Camm MIN.
A conferma del fatto che la bicicletta atterra prima con la ruota anteriore si nota come per quanto riguarda l’impennamento successivo all’atterraggio sia la taratura della forcella ad influire in modo più rilevante: in questo caso il comportamento migliore si ha con valori di Cforc MIN.
4-CONCLUSIONI E POSSIBILI SVILUPPI FUTURI
Lo scopo del modello era quello di valutare il comportamento del sistema uomo-bici in determinate situazioni e valutare come tale comportamento venga influenzato dalla tipologia di taratura di forcella e ammortizzatore: in tal senso i risultati ottenuti sono soddisfacenti in quanto si sono potute notare delle differenze di comportamento evidenti tra una configurazione e l’altra che trovano riscontro teorico.
Il limite maggiore di questo modello è rappresentato dal modellazione del pneumatico infinitamente rigido, rendendo dunque necessaria la riduzione della massa degli elementi costituenti gli arti inferiori per avere un comportamento accettabile del sistema.
Il modello rappresenta comunque un ottimo punto di partenza per una valutazione più accurata del comportamento della bicicletta nelle più disparate situazioni e può essere uno strumento utile sia per i produttori di biciclette che per le case produttrici di forcelle e ammortizzatori.
Di seguito un elenco dei possibili sviluppi futuri del modello:
OTHER 83 DIFFERENT APPLICATIONS !
ALTRI 83 CASI IN SETTORI DIVERSI !
