Raccolta casi Working Model, visualNastran & SimWise - Il visualNastran aiuta...l'Acqua Fiuggi

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
IL VISUALNASTRAN PREVEDE I GUASTI ALL'ACQUA & TERME FIUGGI
Esempio di controllo intelligente per la previsione dei guasti incipienti e latenti in una macchina di imballaggio
Il team del prof. Alessandro De Carli del Dipartimento di Informatica e Sistemistica dell'Università di Roma "La Sapienza" ha recentemente sviluppato un sistema esperto di supervisione e diagnosi per una macchina di imballaggio su pallet delle confezioni di bottiglie d'acqua minerale.
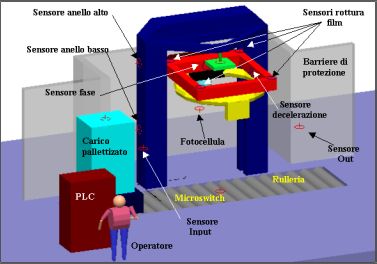
In particolare, l'ing. Luigi Paris, attraverso l'uso del software visualNastran (già noto come Working Model 3D), ha realizzato il modello e il controllo della movimentazione coordinata pluriasse, rappresentata dalla macchina avvolgitrice in figura, vedendo concretizzarsi in una effettiva realizzazione industriale il proprio lavoro di tesi di laurea.

La movimentazione automatica in questione si trova presso lo stabilimento "ACQUA & TERME FIUGGI" ed č stata costruita dalla ROBOPAC sistemi.
Una volta realizzato il modello CAD della macchina, e letto in visualNastran tramite l'integrazione con il CAD suddetto, sono state effettuate varie simulazioni che hanno permesso di stimare i parametri dinamici fondamentali del sistema meccanico, movimentato attraverso opportune leggi di controllo implementate in "MATLAB" e interfacciate con visualNastran in tempo reale, attraverso un programma VISUAL BASIC e SIMULINK.
E' stata quindi ottenuta una simulazione completa del funzionamento della movimentazione coordinata. Attraverso l'animazione di visualNastran, sono state messe in risalto tutte le caratteristiche dei carichi meccanici ed il loro comportamento quando sono soggetti a diversi tipi di controllo.
Il ciclo di funzionamento della macchina studiata si può riassumere in:
L'uso di visualNastran ha permesso di realizzare tutte le strutture che costituiscono l'avvolgitrice, riportando fedelmente le caratteristiche costruttive fornite dai manuali; Si sono potuti quindi scegliere gli organi per la movimentazione coordinata: attuatori e motori. Sono stati utilizzati:
Il modello finale in ambiente visualNastran č rappresentato in figura, mentre un filmato Windows AVI da 890Kb del modello semplificato è scaricabile a questo link.
Inoltre č stata modellata la dinamica secondaria introdotta dalla catena cinematica che realizza l'accoppiamento tra i motori e il carico.
L'intero modello č governato da leggi di controllo, che hanno come riferimento i profili di velocità reali della movimentazione coordinata, imposti dall'inverter che comanda i motori.
Le misure effettuate attraverso la simulazione in ambiente visualNastran hanno permesso di valutare e stimare tutte le caratteristiche dinamiche del sistema complesso non lineare: caratteristiche di attrito, momenti d'inerzia, le caratteristiche della struttura rigida come vibrazioni, oscillazioni, urti e le caratteristiche degli attuatori e motori, tensioni, forze e coppie motrici, velocitŕ, accelerazioni.
Si è ottenuto quindi un valido modello virtuale molto aderente alla realtà.
A questo punto si è potuto studiare e realizzare un sistema esperto, capace di apprendere ed imparare durante la sua evoluzione nel tempo, combinando tecniche di identificazione di tipo neurale e tecniche di valutazione di tipo fuzzy con l'ausilio appunto della strumentazione virtuale.
In conclusione, l'impianto Robocap in funzione presso lo stabilimento "ACQUA & TERME FIUGGI" è stato dotato di intelligenza flessibile, adattabile e modificabile:
FLESSIBILE
Attraverso l'uso di un personal computer, del modello virtuale visualNastran e di Matlab, è ora possibile effettuare il rilevamento dei guasti in maniera statica su un set di misure precedentemente registrate o una previsione dinamica acquisendo le misure in tempo reale da un'interfaccia (RS-232, RS-422, BUS) o estrapolandole dal modello visualNastran.
ADATTABILE
È stato ricostruito il modello funzionale anche dove non è definito o incerto il dato fisico tramite la rete neurale. L'approccio di valutazione tipo "fuzzy" è stato applicato a diverse movimentazioni sia per la sicurezza motori che per la qualità del prodotto, affiancando alla strumentazione reale la strumentazione virtuale.
MODIFICABILE
Notevole la possibilità di riaddestrare automaticamente le reti neurali in caso di variazione dei parametri dovuti alle successioni temporali e all'aggiornamento dell'algoritmo di valutazione fuzzy.
Il programma di supervisione e diagnosi è stato reso operativo con piena soddisfazione per la previsione dei guasti e la disponibilità delle informazioni che aiutano a migliorarne la gestione.
Il sistema esperto, ovviamente, non vuole sostituire l'uomo ma intende migliorare la sicurezza degli azionamenti e la qualità della produzione.
OTHER 83 DIFFERENT APPLICATIONS !
ALTRI 83 CASI IN SETTORI DIVERSI !
