Raccolta casi Working Model, visualNastran & SimWise - Robokoneko

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
A real hardware robot, even of a little cat, can be successfully built after having measured and evaluated all the possible movements thanks to Working Model simulation software.
A team of engineers at Genobyte Inc. in Boulder, Colorado, under the guidance of Australian inventor Hugo DeGaris, is making sure artificial intelligence becomes reality soon - in the form of a robotic cat. Robokoneko, a loose Japanese translation for robot kitten, isn't a walking, purring, furniture-scratching feline yet.
But the foundation of the project, DeGaris' Cellular Automata Machine (CAM) brain, demonstrates
its viability through a simulation generated with Working Model Motion software from MSC Working Knowledge.
"Our goal is to deliver a functional prototype that will use the CAM brain to mimic natural selection," says Gary Fehr of Genobyte. "But doing that takes thousands and thousands of tests, which is more than a mechanical robot could reliably handle. Simulation enables us to perform the evolutionary process and refine the intelligence without maintaining a mechanical robot."
Electronic Neurons, Chromosomes Drive Evolution
DeGaris' CAM brain, funded by Japan's Advanced Telecommunications and Research, is an impressive application of state-of-the-art semiconductor technology. It's constructed from 72 field programmable gate array (FPGA) chips, a type of chip that can reconfigure it's own circuitry to adapt to changing operational requirements. In the CAM Brain, an array of FPGAs is used to emulate a group or module of brain neurons. These neuron groups use FPGA circuitry to reconfigure cyclically according to a genetic algorithm developed by DeGaris. The algorithm works in response to tasks assigned to Robokoneko by Genobyte programmers.
The tasks are very general - a command to have Robokoneko move its left foot, for instance. Once the task is assigned, the CAM Brain runs thousands of random potential solutions to the task via the neural module in the form of bit-strings, which can be regarded as chromo-somes in the artificial brain scheme. As generation after generation runs through the problem, the neural modules reconfigure, retaining knowledge of which bit-strings resulted in optimal function, and passing that "chromosome" to successive generations. A result is achieved after the brain has run the command through thousands of cycles occurring 300 times per second.
Simulations key to tracking evolution
As the neural networks evolve, the CAM Brain essentially turns into a self-constructing computer, programming itself at a rate human programmers couldn't hope to achieve. However, just as a human programmer would be incapable of program-ming the 40-million-neuron CAM Brain, a physical robot would be strained to handle the thousands of tests Robokoneko under-goes in early development.
Unwilling to devote precious development time to maintenance of the mechanical robot, Genobyte turned to Working Model Motion simulation software to create a virtual Robokoneko.
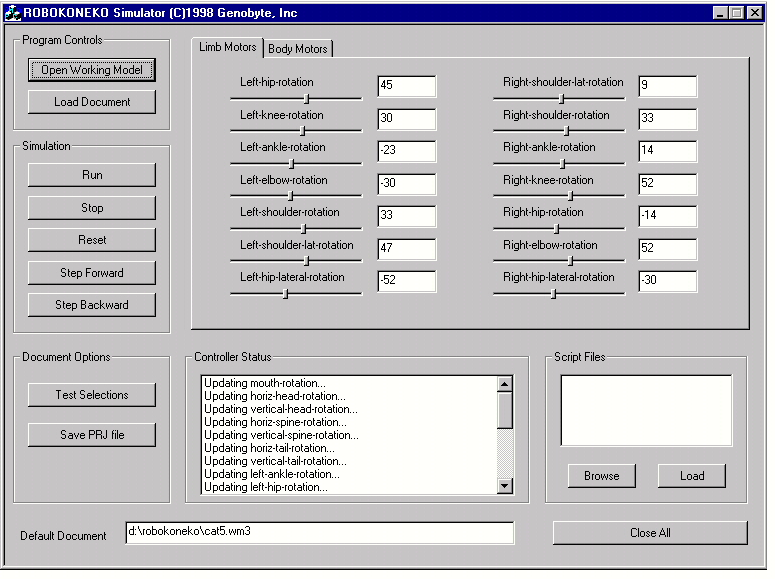
"Our approach to developing the Robokoneko is evolutionary, so by definition it requires tens of thousands of trials," explains Michael Korkin of Genobyte. "A robot would have fallen apart under the strain, so simulation was the best alternative." Working Model Motion's OLE Automation link enabled Genobyte to build a conduit for data between the CAM Brain and the virtual robot. As Korkin recalls, "When we realized what the OLE capability in Working Model Motion would enable us to do, we rejoiced. We finally had a way to send our own working parame-ters to the simulation and back to the CAM Brain."
"Without the Working Model Motion OLE Automation link, simulating the Robokoneko would have been impossible," adds Fehr. "We needed a link between the CAM Brain and the simulation to input control signals dynamically. Working Model Motion was the only software capable of doing that."
Robokoneko realized on screen
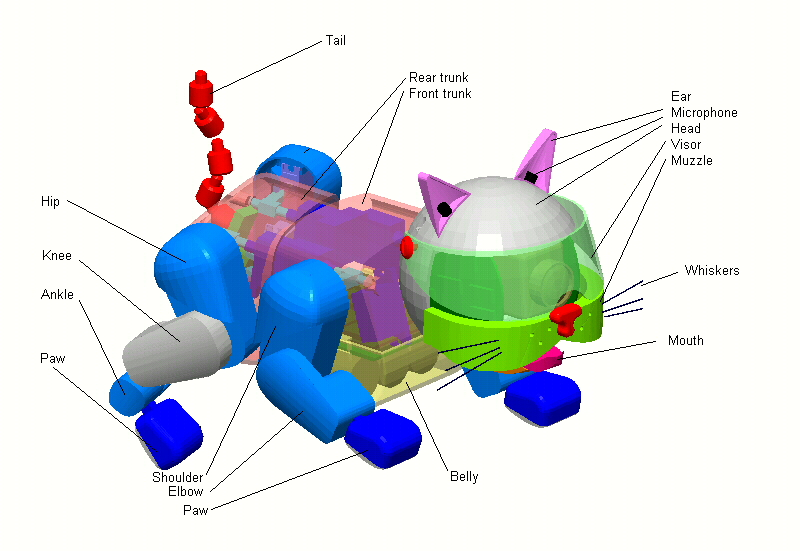
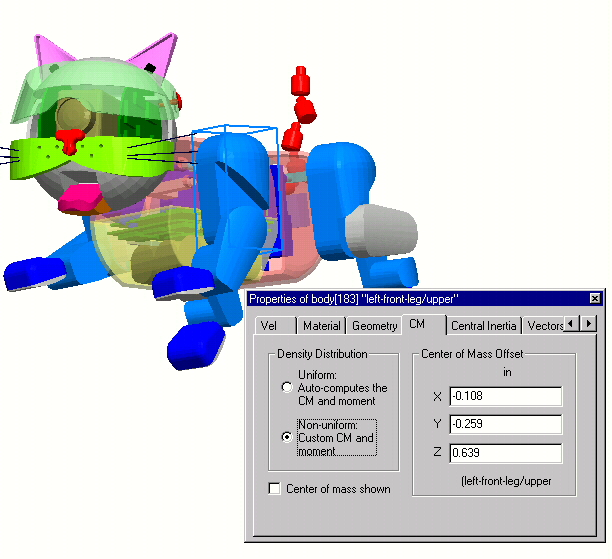
To ready Robokoneko for simulation, Genobyte created a SolidWorks model - complete with all joints necessary to perform a full range of cat-like motions - and imported it to Working Model Motion.
With the model complete, the team feeds objective parameters for various tasks to the model via the OLE link and the simulated Robokoneko runs through thousands of approaches to the solution. The CAM brain receives telemetry from the simu-lated Robokoneko via the OLE link; retaining data about which solutions provided the most effective results and combining that data in an electronic "mutation" with data from other samples of the test group until a "best" solution is achieved. Once a sequence of trials begins, Working Model Motion becomes an integral part of the evolutionary process.
With a successful link between the CAM Brain and simulation software, Genobyte has effectively set the Robokoneko concept into motion. Genobyte's next hurdle is to use the refined CAM Brain to develop a mechanical Robokoneko. Beyond that, DeGaris and company has plans to develop a one-billion neuron brain by 2001.
More detailed pictures on Robokoneko project are available here:
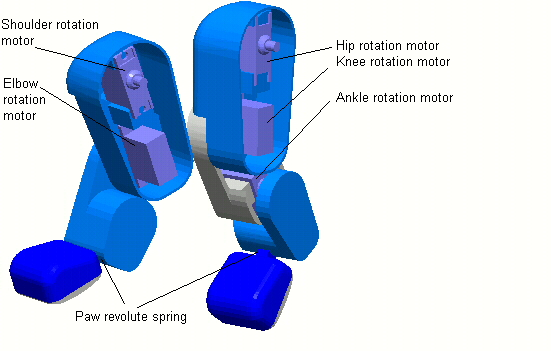
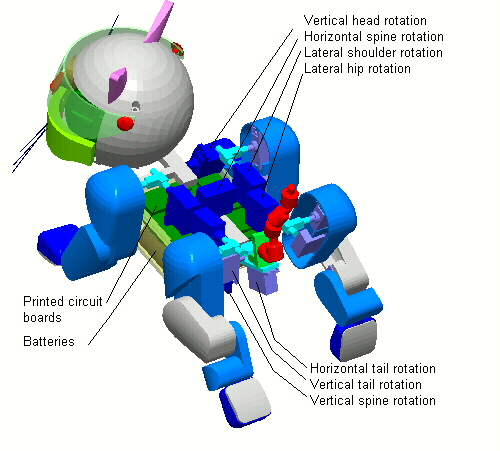
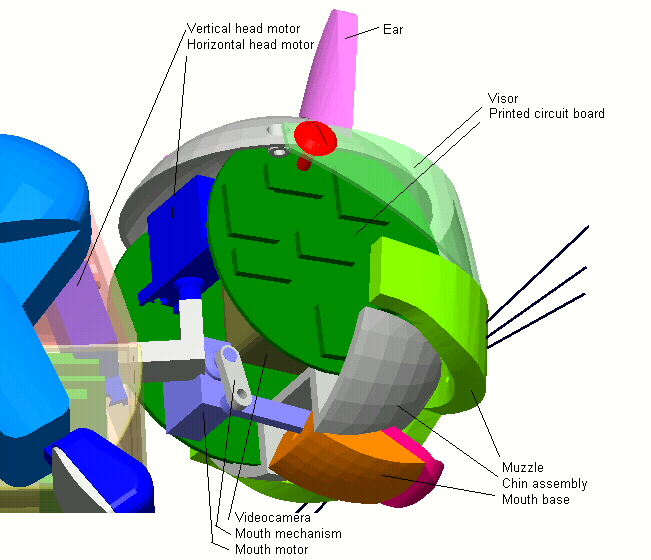
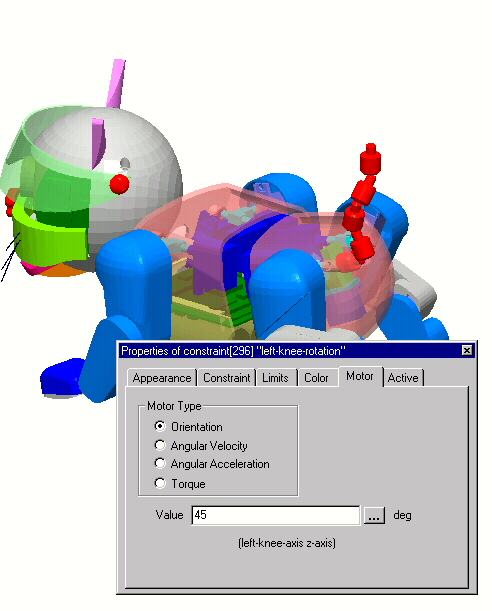
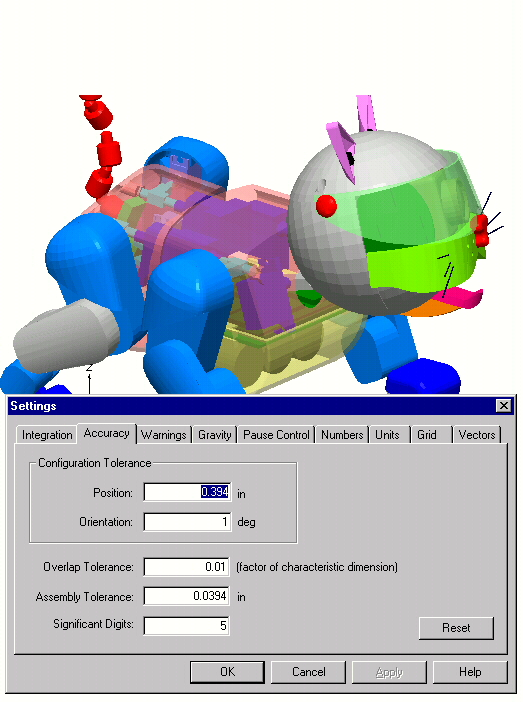
Mechanical design of the robot's front and back legs Internal body control motors and other internal circuitry Internal head circuitry Material and geometric properties settings within Working Model 3D software Robot's motors settings in Working Model 3D software Physical reality simulation settings in Working Model 3D software Robokoneko simulator environment interfacing CAM-Brain Machine and Working Model 3D via OLE link
Additional sample movie made by Nik Petroff on a simplified Robokoneko model is available here:
Simplified movie
ALTRI 83 CASI IN SETTORI DIVERSI !

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}