Raccolta casi Working Model, visualNastran & SimWise - Caricatore industriale pneumatico

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
Please click here for English text
Un team di tre studenti (Giulio Di Gravio, Francesco Costantino e Andrea Cherubini) del prof. Alessandro De Carli dell'Università di Roma, Italia, ha fatto ricorso al visualNastran 4D e al Matlab/Simulink per una serie di tesine d'esame relative alla simulazione e controllo di un caricatore industriale pneumatico multiuso.
Nell'ambito del corso di Automazione Industriale della facoltà di Ingegneria Meccanica dell'Università "La Sapienza" di Roma, tenuto dal prof. Alessandro De Carli, gli studenti, come parte integrante dell'esame, sono stati invitati a svolgere un lavoro di gruppo riguardante l'applicazione ad un caso industriale reale delle tecniche di simulazione e controllo sviluppate durante le lezioni.
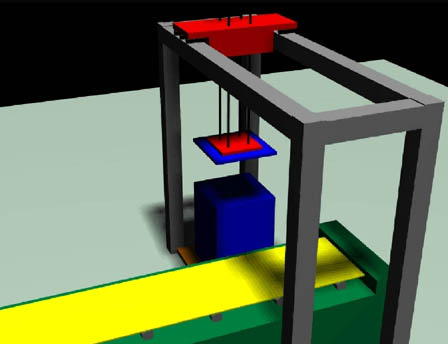
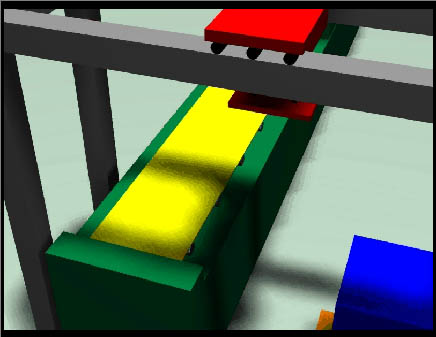
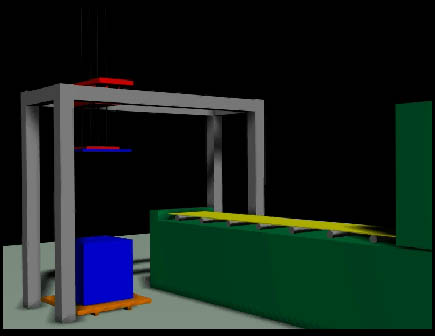
Nel nostro caso, l'analisi č stata incentrata su un tipo di caricatore pneumatico multiuso che la Topfloor Sud s.r.l. adopera nel suo stabilimento di Carsoli (AQ) per la movimentazione di pannelli di legno o materiale inerte (dimensioni 600x600 mm, spessore 30 mm), destinati alla produzione di pavimenti modulari sopraelevati.
La macchina è utilizzata per trasportare i pannelli da una pila su pallet ad un piano di lavoro ad altezza prefissata, in modo da consentire le successive lavorazioni in linea. La funzionalità descritta è ottenuta tramite l'attivazione di un dispositivo pneumatico che, una volta effettuato l'aggancio del panello, provvede al suo sollevamento fino ad una quota prestabilita e dallo scorrimento orizzontale di un carrello per lo spostamento fino al punto di lavoro, in cui viene scaricato il pannello. Il ciclo di lavoro della macchina è organizzato in modo che avvengano in sequenza le seguenti operazioni:
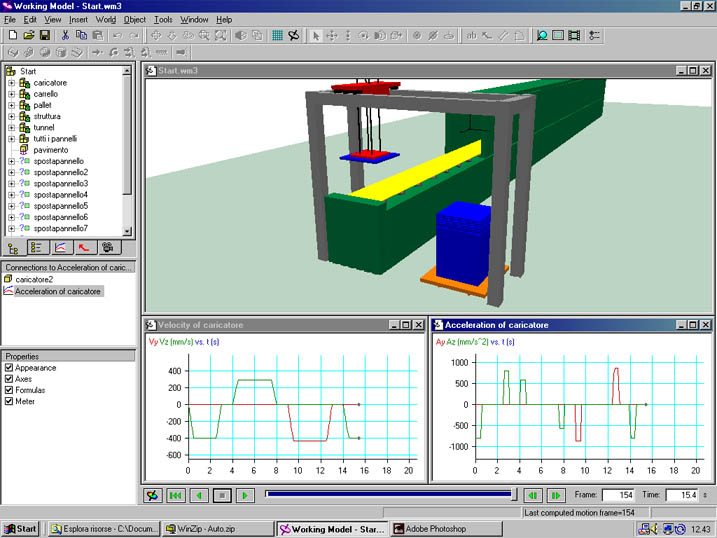
Per progettare la modalitŕ di controllo è stato utilizzato il pacchetto software MATLAB 6.0 con l'estensione SIMULINK e l'impiego della toolbox STATE FLOW per la massa a punto del programma di sequenzializzazione e temporizzazione, seguendo la logica delle macchine a stati finiti (FSM): in questo modo sono state riprodotte le funzionalitŕ di controllo di un PLC al fine di evidenziare eventuali problemi legati al coordinamento dei dispositivi presenti e allo sviluppo delle loro dinamiche in stato di funzionamento corretto e a regime. Una volta ottenuti i profili ottimali della movimentazione dei vari organi, abbiamo potuto procedere alla realizzazione diretta del modello in VISUAL NASTRAN 4D e all'importazione dei dati.
Sulla struttura portante fissa al terreno, sviluppano il loro moto l'oggetto CARRELLO, mediante un attuatore lineare per spostamenti orizzontali, solidale alla struttura stessa, e l'oggetto CARICATORE, con attuatore anch'esso lineare ma per movimentazioni verticali e solidale al carrello. L'effetto di aggancio del pannello è stato messo in pratica grazie all'adozione di un vincolo generico che permette al corpo di seguire la traiettoria sviluppata dall'organo di presa.
È qui possibile visionare un filmato avi ridotto di 1,5Mb che riproduce parte della simulazione. Una versione decisamente più scenografica, utilizzata come supporto alla presentazione del lavoro completo, con maggiori effetti audio e video è stata realizzata dagli stessi autori ed è disponibile su richiesta su supporto CD.
CONCLUSIONE
La disponibilità di un modello affidabile in "realtà virtuale" consentite di mettere a punto la modalitŕ di controllo fino ad ottenere un miglioramento delle prestazioni senza introdurre alcuna modifica alla strumentazione e mettere le premesse per sviluppare ulteriori modalità di controllo che siano in grado di migliorarne l'efficienza, senza dover apportare modifiche alla struttura meccanica, che rimane comunque la parte piů costosa dell'intera macchina automatizzata.
Laureandi: Giulio Di Gravio, Francesco Costantino, Andrea Cherubini
Relatore: prof. Alessandro De Carli, Università di Roma - Italia
ALTRI 83 CASI IN SETTORI DIVERSI !
