Raccolta casi Working Model, visualNastran & SimWise - Dynamic simulation of the human ankle joint

Contatto Editoriale:
Paolo Lista,
Lista Studio srl®
Borgo Belvigo 33, 36016 Thiene Vi ITALY
tel/fax 0445,372479 o info@lista.it
Alberto Leardini, of the Movement Analysis Laboratory, Istituti Ortopedici Rizzoli, Bologna, Italy, and Demetrio Moschella, of Dipartimento di Meccanica, Università della Calabria, Arcavacata di Rende, Italy, have published an interesting paper on the dynamic simulation of the natural and replaced human ankle joint in Med. Biol. Eng. Comput., 2002, 40, 193-199
With the kind permission of the Authors, some general ideas are here presented, while the full theoretical explanations and relevant detailed presentations is available in the previously referred paper.
Introduction
Disappointing results for total ankle replacement have been explained by poor knowledge of the mechanics of the intact and replaced joints.
Dynamic simulation tools have the capacity to simulate dynamic conditions that occur in human joints.
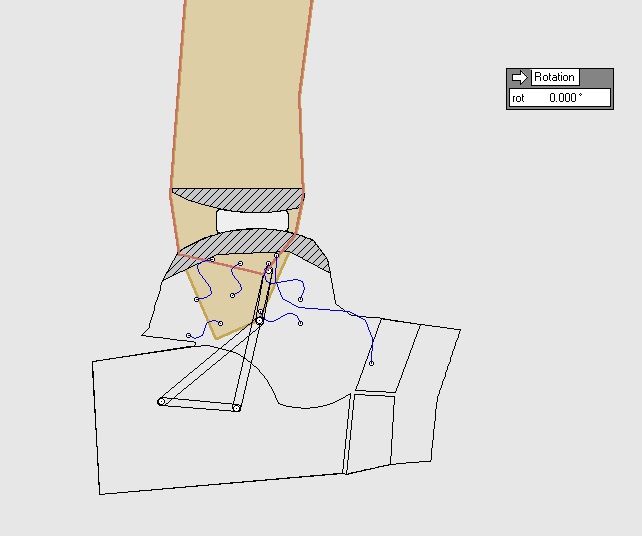
The Working Model 2D tool was used to simulate the mechanics of the intact and replaced ankle joints, based on previously validated mathematical models.
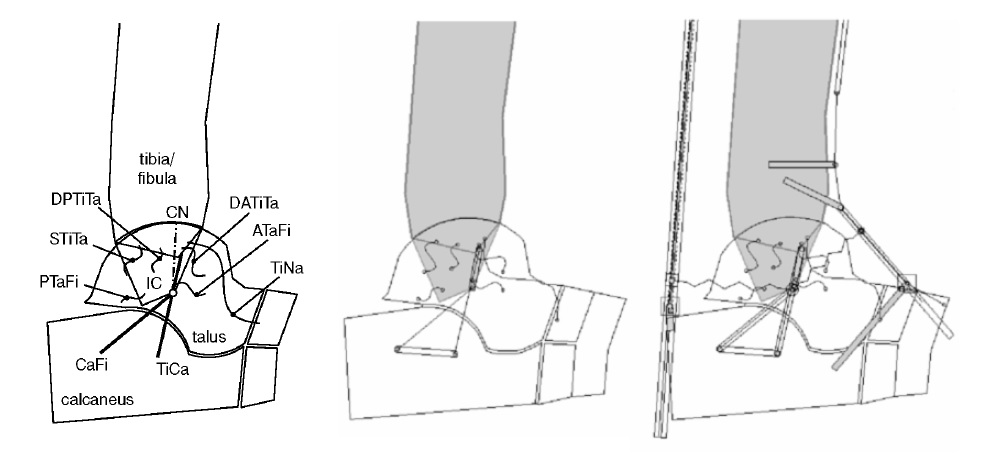
Elementary objects were used to model ligaments, articular surfaces, retinacula and muscle-tendon units.
The performance of several pairs of prosthetic articular surfaces was also analysed.
According to the results of these simulations, rolling as well as sliding motion occurs in the natural ankle, governed by a ligamentous linkage.
Elongation of the tibiocalcaneal and calcaneofibular ligaments was found to be 1.5% and 4.8%, respectively. A 13% change in lever arm length occurred for both
the tibialis anterior and gastrocnemius muscles during ankle flexion.
Unlike the currently available three-component designs, the newly proposed convex-tibial ligament-compatible prosthesis was found to be able to restore the original mobility and physiological function of the ligaments.
This prosthesis combines freedom from restraint with congruity of the components throughout the range of flexion.
Discussion
Several issues in the field of human ankle mechanics were addressed by using a commercially available dynamic simulation tool as Working Model.
For a detailed presentation of the several models developed with Working Model please refer to Med. Biol. Eng. Comput., 2002, 40, 193-199.Elementary objects were used to model ligaments, natural and prosthetic articular surfaces, retinacula and muscletendon units.
The resulting simulations provided insight into the physiological role of these structures in joint motion and into the options for total ankle replacement.
The present simulations were first well-supported by previous mathematical and geometrical models that justified the assumptions and the selections of the most appropriate elementary objects.
Once these were defined for the human ankle joint, the facilities of the simulation tool were demonstrated to be
valuable when motion and forces were being modelled with mechanical analogues.
Mechanical parameters for the objects and the joints, such as friction, rigidity, elasticity etc., can be freely changed.
Different combinations of these objects and these parameters were in fact tested. The time history of several interesting geometrical and mechanical functions can be obtained when the models run correctly.
One of the results of the simulation was that the visualisation of realistic movements facilitated understanding of the interaction between the passive joint structures. Moreover, the proposed models can now easily serve also to simulate changes to the original physiological geometry, such as bone deformity, fracture and mal-tmion or ligament injury and reconstruction.
Although supposed to have limited performance with respect to alternative, more robust, packages in 3D, the Working Model 2D tool used in the present study has shown appropriate and suitable features for the solution of the simulations under analysis.
The replacement of the articular surfaces with a prosthesis was addressed here as well.
The design of human joint replacements involves a delicate balance between many conflicting criteria, involving analysis of ligament balancing, kinematics, contact pressure and wear-related problems, impingement of the components, sizing etc.
This analysis can therefore particularly benefit from the mechanical models reported here and from the ability of the simulation tool presented here.
Pre-prototyping can be performed to test for the possible options before proceeding to manufacturing. Several different shapes and dimensions of the components can be exploited to maximise contact areas and entrapment by avoiding, at the same time, impingement and overlapping. Further small details of the
prosthesis components, such as fixation, sizing etc., can be efficiently defined, also with respect to several different series
of ranges of motion. Several elementary measurements, such as distance, force, torque, strain, etc., can be obtained. The use of
these tools is the only alternative at the moment to using physics based models to characterise human joint mechanics and to evaluate the performance o f the joint replacement devices.
Most previous models of human joints use mathematical expressions to define contact surfaces and the mechanical behaviour of muscles, ligaments and cartilage, requiring extensive analysis and programming. They also provide little animation to represent the effects of changes and improvements. The present simulation tool can be exploited for the analysis of other models and of different prosthesis designs and even of other joints.
Although in the sagittal plane only, much has been learned from these models of intact and replaced ankle joints.
The two-dimensional simulation has provided guidance in the understanding of the role of the passive structures and in the choice of the key geometric features for possible replacements. Extensions of the present models to three-dimensions are certainly sought in the future, but these would require a corresponding, well established,
3D mechanical analogue for the ankle joint mechanism. Extensions of the models also to:
The reproduction of other tasks, such as the anterior or posterior calcaneal drawer, muscle strengthening exercises etc., are certainly of clinical interest as well.
Although the present tool has demonstrated the capacity to represent effectively dynamic conditions that occur in the human ankle joint in the sagittal plane, analyses using more powerful simulation tools should be examined and exploited in the furore for more thorough, three-dimensional developments.
Conclusions
A dynamic simulation tool, Working Model 2D, well supported by previously validated geometrical models, has been demonstrated to be valuable for describing the geometry and kinematics of the intact human ankle joint.
The models of the intact ankle have demonstrated the fundamental role played by the ligaments in guiding and limiting joint motion.
Simulation models based on these results have also been fundamental to defining the performance of current and possible novel designs of ankle replacement.
A novel convex-tibial plus ligament-compatible talus prosthesis was found to be compatible with the physiological function of the retained ligamentous structures, it combines complete freedom from restraint with complete congruity of the components throughout the range of flexion.
Problems with previous designs were explained by the incompatibility of the prosthetic components with the retained ligamentous structures.
Per ulteriori informazioni contattare la Lista Studio srl®
ALTRI 83 CASI IN SETTORI DIVERSI !
