Quali forze e coppie applica ciascuno dei vincoli disponibili in visualNastran 3D Motion?
WM3D constraints apply the following forces and torques to appropriately constrain the motion of the bodies they are attached to:
Rigid Joint Rotate Around: No Axes |
Fx , Fy , Fz , Tx , Ty , Tz | 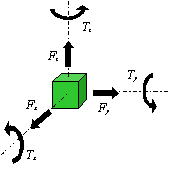 |
Revolute Joint Rotate Around: Z |
Fx ,Fy ,Fz ,Tx ,Ty | 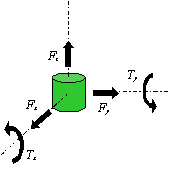 |
Spherical Joint Rotate Around: All |
Fx ,Fy ,Fz | 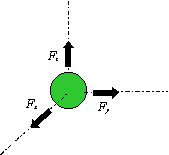 |
Rigid Joint on Slot Rotate Around: No Axes |
Fx ,Fy ,Tx ,Ty ,Tz | 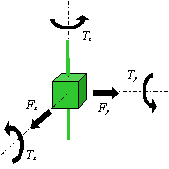 |
Revolute Joint on Slot Rotate Around: Z |
Fx ,Fy ,Tx ,Ty | 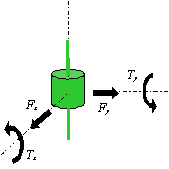 |
Spherical Joint on Slot Rotate Around: All |
Fx ,Fy |  |
Revolute Motor Rotate Around: Z |
Fx , Fy , Fz , Tx , Ty , Tz | 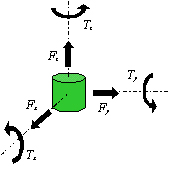 |
Revolute Spring/Damper Rotate Around: Z |
Fx , Fy , Fz , Tx , Ty , Tz | |
Versioni pertinenti:
visualNastran 3D Motion, FEA Inside, 4D, SimWiseData ultimo aggiornamento: 2 settembre 2011

Lista Studio srl®
URL : http://www.simwise4d.it
diritti riservati, riproduzione vietata